Numerical integration¶
 |
 |
 |
|
|
|
## loading python libraries
# necessary to display plots inline:
%matplotlib inline
# load the libraries
import matplotlib.pyplot as plt # 2D plotting library
import numpy as np # package for scientific computing
plt.rcParams["font.family"] ='Comic Sans MS'
from scipy.integrate import newton_cotes # coefficients for Newton-Cotes quadrature rule
from scipy.special import roots_legendre # coefficients for Gauss-Legendre quadrature rule
from math import * # package for mathematics (pi, arctan, sqrt, factorial ...)
Suppose you want to compute the integral of a function $f$ on an interval $[a,b]$:
$$ \int_a^b f(x)dx $$and suppose that
Depending on the problem, the set of points $x_k$ at which we know $f$ might be given to us, or we might be able to chose it. In both of these cases, the integral cannot be computed exactly and one has to design a numerical method to estimate its value.
We give below three examples of situations where such a numerical approximation is needed.
We consider the following problem from the book Numerical analysis of R. Burden and J. Faires.
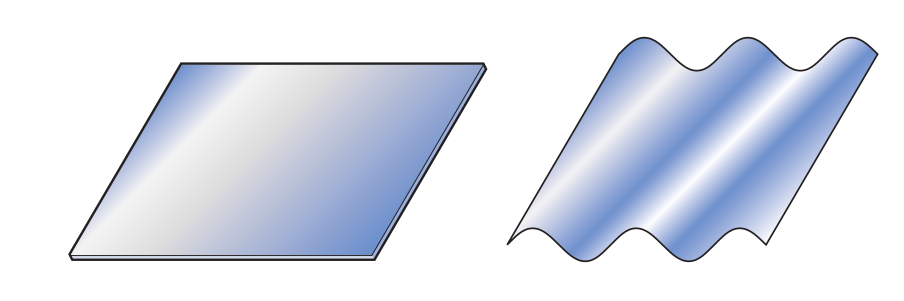
A sheet of corrugated roofing is constructed by pressing a flat sheet of aluminum into one
whose cross section has the form of a sine wave. A corrugated sheet 48 inches long is needed, the height of each wave is 1 inch from the center line, and each wave has a period of approximately $2\pi$ inches.
The problem of finding the length
of the initial flat sheet is one of determining the length of the curve given by $f (x) = \sin x$ from $x = 0$ inch to $x = 48$ inches. From calculus we know that this length is
$$ l = \int_{0}^{48} \sqrt{1 + f'(x)^2}dx = \int_{0}^{48} \sqrt{1 + cos^2(x)}dx$$so the problem reduces to evaluating this integral. Although the sine function is one of
the most common mathematical functions, the calculation of its length involves an elliptic integral of the second kind, which cannot be evaluated explicitly.
Suppose that a car laps a race track in 84 seconds and that one wants to compute the corresponding length of the track. If $v(t)$ is the velocity of the car at time $t$, we have that $$ \text{Length} = \int_0^{84} v(t)dt. $$
Unfortunately, we do not have at our disposal the velocity for all values of $t$. Indeed, we only have access to the speed of the car at each 6-second interval, determined by using a radargun and given in feet/second. The corresponding values are given below.
| Time | 0 | 6 | 12 | 18 | 24 | 30 | 36 | 42 | 48 | 54 | 60 | 66 | 72 | 78 | 84 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Speed | 124 | 134 | 148 | 156 | 147 | 133 | 180 | 109 | 99 | 85 | 78 | 89 | 104 | 116 | 123 |
One needs to find a way to approximate the length of the track using these discrete values.
Suppose you want to study the behavior of dry granular medium. Such a system is made of an assembly of solid particles, being subject to external forces such as gravity, an external fluid inter-particle forces or contact forces...
To model such a system, one has to write, for each of the particles, Newton's second law, which expresses the conservation of momentum. To do so, one has to estimate the forces and their momentum exerted on each of the particles.
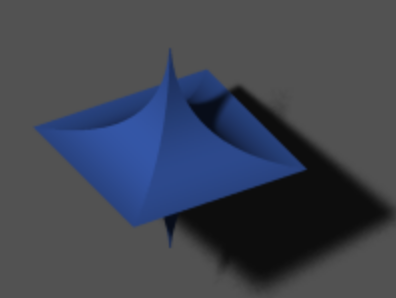
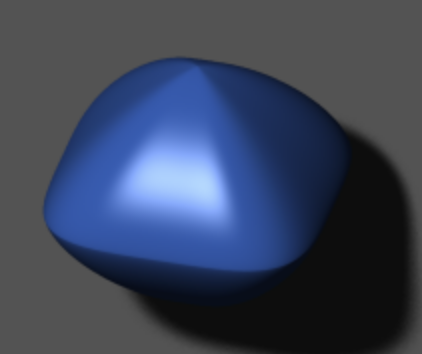
The first step to achieve this task is to be able to compute the mass of the particles. However, this mass depends both on the density of a particle and on its shape. If $B$ is the domain of the grain and $\rho$ its density, its mass is then given by:
$$ \int_{B} \rho dxdydz =\rho\int_{B}dxdydz.$$One can consider particles with various shapes $B$. In some simple cases, the integral can be computed explicitly. For example one can consider
This is the easiest way to represent the grain and you only need to find the volume of a ball, which is explicitly known: $$ V = \frac{4}{3}\pi R^3. $$
For $a=b=c=R$, one recovers the ball of radius $R$. In general, the volume of an ellipsoid is given by: $$ V = \frac{4}{3}\pi a\,b\,c. $$
For $e=n=1$, one recovers the ellipsoid of parameters $a$, $b$ and $c$. The volume of such solids cannot be explicitly computed in general and one has to numerically estimate the integral. Two examples of super-ellipsoids are plotted on the following figure:
 |
 |
Suppose you want to compute
$$ \int_a^b f(t)dt. $$Our goal is to find an approximation of that integral using a weighted sum of values of $f$.
An elementary quadrature rule is a linear map of the form
$$ I^n_{[a,b]}: f \mapsto \sum_{k=0}^n f(x_k)\omega_k, $$which associates to any function $f$ a number $I^n_{[a,b]}(f)$ supposed to approximate $\int_a^b f(t) dt$. An elementary quadrature rule is entirely determined by the pairs $(x_k,\omega_k)_{k=0..n}$, which are often represented in a table listing the values of these pairs:
\begin{array}{c|cccc} x_k & x_0 & x_1 & \ldots & x_n \\ \hline \omega_k & \omega_0 & \omega_1 & \ldots & \omega_n \end{array}The integer $n$ is the degree of the quadrature rule, the points $(x_k)_{k=0..n}$ are called the nodes of the quadrature rule (and are assumed to be all different), and the coefficients $(\omega_k)_{k=0..n}$ its weights.
Complete the following cell to get a function QuadRule which evaluates such a quadrature rule $\sum_{k=0}^n f(x_k)\omega_k$. In the subsequent cell, use this function to check that the proposed nodes and weights give a quadrature rule which approximates $\int_{0}^{\pi}$ reasonably well, by choosing simple functions $f$ for which you can compute the integral by hand.
def QuadRule(f, x, w):
"""
Approximate integral using a quadrature rule
-----------------------------------------
Inputs :
f: function to be integrated
x: 1D array containing the nodes [x_0,...,x_n]
w: 1D array containing the weights [w_0,...,w_n]
Output
the value of sum f(x_k)*w_k
"""
return np.sum(f(x)*w)
# Some given nodes and weights for a quadrature formula approximating the integral between 0 and pi
x = np.array([0.354062724002813, 1.570796326794897, 2.787529929586980])
w = np.array([0.872664625997165, 1.396263401595464, 0.872664625997165])
def ftest1(x):
return np.sin(x)
I_f1 = QuadRule(ftest1, x, w)
print("For the function f(x) = sin(x), the integral is equal to 2, and the quadrature rule gives %.5f" % I_f1)
def ftest2(x):
return np.exp(x)
I_f2 = QuadRule(ftest2, x, w)
I_2 = np.exp(np.pi) - 1
print("For the function f(x) = exp(x), the integral is equal to exp(pi)-1 = %.5f," % I_2, "and the quadrature rule gives %.5f" % I_f2)
For the function f(x) = sin(x), the integral is equal to 2, and the quadrature rule gives 2.00139 For the function f(x) = exp(x), the integral is equal to exp(pi)-1 = 22.14069, and the quadrature rule gives 22.13292
Note that through the change of variable $t = a + \frac{x+1}{2}(b-a)$, an integral on $[a,b]$ can always be transformed into an integral on $[-1,1]$, and vice versa:
$$\int_a^bf(t)dt=\frac{b-a}{2}\int_{-1}^1 f\left(a + \frac{x+1}{2}(b-a)\right)dx.$$Therefore, we can simply focus on quadrature rules on $[-1,1]$. Indeed, starting from a given quadrature rule on $[-1,1]$
$$ \int_{-1}^{1} f(x)dx \approx I^n_{[-1,1]}(f) = \sum_{k=0}^n f(x_k)\omega_k, $$the same change of variable yields
$$ \int_a^bf(x)dx \approx I^n_{[a,b]}(f) = \frac{b-a}{2}\sum_{k=0}^n \omega_k\, f\left(a + \frac{x_k+1}{2}(b-a)\right) = \sum_{k=0}^n f(\tilde x_k) \tilde \omega_k,$$where
$$ \tilde x_k = a + \frac{x_k+1}{2}(b-a) \qquad{}\text{and}\qquad{} \tilde \omega_k = \frac{b-a}{2} \omega_k. $$The question which now arises is: how to chose the nodes and the weights to get a quadrature rule which approximates the integral well?
A natural way of approximating integrals is to replace $f$ by an approximation whose integral is easier to compute. Since the integral of polynomials is easy to compute, one can think of replacing $f$ by its Lagrange interpolation polynomial $P_n(f)$.
Consider $f: [-1,1]\to \mathbb{R}$ and $n+1$ interpolation nodes $(x_k)_{k=0..n}$ in $[-1,1]$. We recall that the interpolation polynomial $P_n(f)$ can be written
$$ P_n(f)(x) = \sum_{k=0}^n f(x_k) L_k(x), $$where $(L_k)_{k=0..n}$ is the basis of elementary Lagrange polynomials given by
$$ L_k(x) = \prod_{i \neq k}\frac{x - x_i}{x_k - x_i}, \quad{} 0 \leq k \leq n.$$Then, the integral of $f$ on $[-1,1]$ can be approximated by
$$\int_{-1}^1 P_n(f)(x)dx = \int_{-1}^1 \sum_{k=0}^n f(x_k) L_k(x) dx = \sum_{k=0}^n \left(\int_{-1}^1 L_k(x) dx \right)f(x_k) .$$Taking
$$ \omega_k = \int_{-1}^1 L_k(x) dx, $$the approximation of $f$ by $P_n(f)$ therefore yields a quadrature rule
$$ I^n_{[-1,1]}(f) = \int_{-1}^1 P_n(f)(x) dx = \sum_{k=0}^{n}\omega_k\,f(x_k), $$which can be used to approximate $\int_{-1}^1 f(x) dx$.
Consider $n+1$ interpolation nodes $(x_k)_{k=0..n}$ in $[-1,1]$. The quadrature rule $I^n_{[-1,1]}$ defined by
$$ I^n_{[-1,1]}(f) = \sum_{k=0}^{n}\omega_k\,f(x_k), \qquad{} \omega_k = \int_{-1}^1 L_k(x) dx, $$is called the quadrature rule based on Lagrange interpolation (associated to the nodes $(x_k)_{k=0..n}$).
We are going to study specific examples of quadrature rules obtained this way in a moment, but let us first discuss some general properties.
Consider $f: [-1,1]\to \mathbb{R}$, and for all $n\in\mathbb{N}$, $n+1$ interpolation nodes $(x_k)_{k=0..n}$ in $[-1,1]$ together with the quadrature rule $I^n_{[-1,1]}$ based on Lagrange interpolation for those nodes. If the interpolation polynomial $P_n(f)$ converges uniformly to $f$ on $[-1,1]$, i.e. if
$$ \sup_{x\in[-1,1]} |f(x) - P_n(f)(x)| \rightarrow 0 \quad{} \text{when} \quad{} n\rightarrow \infty, $$then
$$I^n_{[-1,1]} (f) \rightarrow \int_{-1}^1 f(x) dx \quad{} \text{when} \quad{} n\rightarrow \infty. $$Proof. We have
$$\begin{aligned}\left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| & =\left|\int_{-1}^1 f(x) d x-\int_{-1}^1 P_n(f)(x) d x\right| \\ & \leq \int_{-1}^1\left|f(x)-P_n(f)(x)\right| d x \\ & \leq\left(\sup _{x \in[-1,1]}\left|f(x)-P_n(f)(x)\right|\right)\left(\int_{-1}^1 1 d x\right) \\ & =2 \sup _{x \in[-1,1]}\left|f(x)-P_n(f)(x)\right|, \end{aligned}$$and this upper bound goes to zero when $n$ goes to infinity, which ends the proof.
If we want to study the error for a given value of $n$, we can use the error estimates that we obtained in the previous chapter on $P_n(f)$.
Let $f : [-1,1] \to \mathbb{R}$ be $n+1$ times differentiable, and $x_0,\ldots,x_n$ be $n+1$ distinct interpolations nodes in $[-1,1]$. Consider the quadrature rule $I^n_{[-1,1]}$ based on Lagrange interpolation. Then
$$\left\vert \int_{-1}^1 f(x) dx - I^n_{[-1,1]} (f) \right\vert \leq \frac{2\sup_{x\in [-1,1]} \left\vert \Pi_{x_0,\ldots,x_n}(x) \right\vert }{(n+1)!} \sup_{x\in [-1,1]} \left\vert f^{(n+1)}(x) \right\vert, $$where
$$ \Pi_{x_0,\ldots,x_n}(x) = (x-x_0)(x-x_1)\cdots(x-x_n). $$Proof. We start again by writing
$$\begin{aligned}\left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| & =\left|\int_{-1}^1 f(x) d x-\int_{-1}^1 P_n(f)(x) d x\right| \\& \leq \int_{-1}^1\left|f(x)-P_n(f)(x)\right| d x,\end{aligned}$$and then use that (see the previous chapter)
$$ \left\vert f(x) - P_n(f)(x) \right\vert \leq \frac{\sup_{x\in [-1,1]} \left\vert \Pi_{x_0,\ldots,x_n}(x) \right\vert }{(n+1)!} \sup_{x\in [-1,1]} \left\vert f^{(n+1)}(x) \right\vert,$$which yields
$$\begin{aligned}\left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| & \leq \frac{\sup _{x \in[-1,1]}\left|\Pi_{x_0, \ldots, x_n}(x)\right|}{(n+1)!} \sup _{x \in[-1,1]}\left|f^{(n+1)}(x)\right| \int_{-1}^{1} 1 d x \\& =\frac{2 \sup _{x \in[-1,1]}\left|\Pi_{x_0, \ldots, x_n}(x)\right|}{(n+1)!} \sup _{x \in[-1,1]}\left|f^{(n+1)}(x)\right| .\end{aligned}$$
If we consider a general interval $[a,b]$, and the corresponding quadrature rule $I^n_{[a,b]}$, this error bound writes
$$\left\vert \int_{a}^b f(x) dx - I^n_{[a,b]} (f) \right\vert \leq \left(\frac{b-a}{2}\right)^{n+2} \, \frac{2\sup_{x\in [-1,1]} \left\vert \Pi_{x_0,\ldots, x_n}(x) \right\vert }{(n+1)!} \sup_{x\in [a,b]} \left\vert f^{(n+1)}(x) \right\vert. $$Another notion that can be helpful in measuring the quality of a quadrature rule is its order of accuracy, sometimes also referred to simply as order. Note that this is different from the order of convergence* introduced in the first chapter.*
Consider any quadrature rule
$$ I^n_{[-1,1]} (f) = \sum_{k=0}^n f(x_k) \omega_k. $$If this quadrature rule is exact for all polynomials of degree $n_a$ or less, i.e.
$$ I^n_{[-1,1]} (Q) = \int_{-1}^1 Q(x) dx \quad{} \text{for all polynomial }Q\text{ of degree }n_a\text{ or less}, $$then the quadrature rule is said to be of order of accuracy at least $n_a$, or simply of order at least $n_a$. If there also exists a polynomial of degree $n_a+1$ for which the quadrature rule is not exact, i.e.
$$ I^n_{[-1,1]} (Q) \neq \int_{-1}^1 Q(x) dx \quad{} \text{for a polynomial }Q\text{ of degree }n_a+1, $$then the quadrature rule is of order of accuracy $n_a$, or simply of order $n_a$.
Consider $n+1$ interpolation nodes $x_0,\ldots,x_n$ in $[-1,1]$.
The associated quadrature rule $I^n_{[-1,1]}$ based on Lagrange interpolation is of order at least $n$.
Reciprocally, if a quadrature rule with $n+1$ nodes $I^n_{[-1,1]} (f) = \sum_{k=0}^n f(x_k) \omega_k$ is of order at least $n$, then it must be the quadrature rule based on Lagrange interpolation.
$$L_j(x_k) = \left\{\begin{aligned}&1 \quad{} & j=k, \\&0 \quad{} & j\neq k,\\\end{aligned}\right.$$Proof.
$$I^n_{[-1,1]}(Q) = \int_{-1}^1 P_n(Q)(x) dx = \int_{-1}^1 Q(x) dx,$$
- For any polynomial $Q$ of degree $n$ or less, one has $P_n(Q)=Q$ by uniqueness of the Lagrange interpolation polynomial. Therefore, if we consider the quadrature rule based on Lagrange interpolation, for any such polynomial $Q$ we have
and the quadrature rule is of order at least $n$.
- Reciprocally, let us consider a quadrature rule $I^n_{[-1,1]} (f) = \sum_{k=0}^n f(x_k) \omega_k$ of order at least $n$. The Lagrange elementary polynomials
$ $ $$ L_j(x) = \prod_{i \neq j}\frac{x - x_i}{x_j - x_i}$$ $ $ are of degree $n$, therefore the quadrature rule is exact for them: $ $ $$I^n_{[-1,1]} (L_j) = \sum_{k=0}^n L_j(x_k) \omega_k = \int_{-1}^1 L_j(x) dx.$$ However, for each elementary Lagrange polynomial we have
therefore we get $$\omega_j = \int_{-1}^1 L_j(x) dx,$$
which are the weights of the quadrature rule based on Lagrange interpolation.
The order of accuracy allows us to get another error bound for quadrature rules.
Let $I^n_{[-1,1]}$ be an elementary quadrature rule on $[-1,1]$, written as
$$ I^n_{[-1,1]}(f) = \sum_{k=0}^n \omega_k f(x_k), $$and of order at least $n_a$. Then, for any function $f\in \mathcal{C}^{n_a+1}([-1,1])$, we have
$$ \left\vert \int_{-1}^{1} f(x)dx - I^n_{[-1,1]}(f)\,\right\vert \leq \frac{2+\sum_{k=0}^n |\omega_k| }{(n_a+1)!}\sup_{x\in [-1,1]} \left\vert \,f^{(n_a+1)}(x)\,\right\vert. $$Proof. The main idea is to approach $f$ by its Taylor expansion of degree $n_a$, for which the quadrature rule is exact. Introducing
$$Q_{n_a}(x) = f(0) + f'(0)x + \ldots + \frac{f^{(n_a)}(0)}{n_a !}x^{n_a},$$Taylor-Lagrange formula yields
$$\forall x\in [-1,1],\quad{} \left\vert f(x) - Q_{n_a}(x)\right\vert \leq \frac{1}{(n_a+1)!}\sup_{x\in[-1,1]}\left\vert \,f^{(n_a+1)}(x)\,\right\vert.$$Moreover, since $Q_{n_a}$ is a polynomial of degree at most $n_a$, $\int_{-1}^1 Q_{n_a}(x)dx = I^n_{[-1,1]}(Q_{n_a})$, which means we have
$$\begin{aligned}\left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| & =\left|\int_{-1}^1\left(f(x)-Q_{n_a}(x)\right) d x-I_{[-1,1]}^n\left(f-Q_{n_a}\right)\right| \\& \leq \int_{-1}^1\left|f(x)-Q_{n_a}(x)\right| d x+\sum_{k=0}^n\left|\omega_k\right|\left|f\left(x_k\right)-Q_{n_a}\left(x_k\right)\right| \\& \leq\left(2+\sum_{k=0}^n\left|\omega_k\right|\right) \sup _{x \in[-1,1]}\left|f(x)-Q_{n_a}(x)\right| \\& \leq \frac{2+\sum_{k=0}^n\left|\omega_k\right|}{\left(n_a+1\right)!} \sup _{x \in[-1,1]}\left|f^{\left(n_a+1\right)}(x)\right| .\end{aligned}$$
In principle, we would like all the weights $\omega_k$ to be nonnegative. Otherwise, $I^n_{[-1,1]}(f)$ could be negative for a nonnegative function $f$. The above estimate also suggests that it could be beneficial for all the weights to be nonnegative. Indeed, the term $\sum_{k=0}^n \vert\omega_k\vert$ would then simply be equal to 2, whereas having some negative weights could lead to $\sum_{k=0}^n \vert\omega_k\vert$ being much larger.
Notice that the main difference compared to the previous estimate we obtained using the error for Lagrange interpolation is the scaling with respect to the length $b-a$ of the interval. Here we have $(b-a)^{n_a+2}$, instead of $(b-a)^{n+2}$ for the other estimate.
The factor $\sum_{k=0}^n \vert\omega_k\vert$ also naturally appears as a measure of stability of the associated quadrature rule. Indeed, given two functions $f$ and $\tilde f$, we have
\begin{align} \left\vert I^n_{[-1,1]}(f) - I^n_{[-1,1]}(\tilde f) \right\vert &\leq \sum_{k=0}^n \vert \omega_k\vert \left\vert f(x_k) - \tilde f(x_k) \right\vert \\ &\leq \left( \sum_{k=0}^n \vert \omega_k\vert \right) \max_{0\leq k\leq n} \left\vert f(x_k) - \tilde f(x_k) \right\vert \\ &\leq \left( \sum_{k=0}^n \vert \omega_k\vert \right) \sup_{x\in [-1,1]} \left\vert f(x) - \tilde f(x) \right\vert. \end{align}Therefore, if $f$ and $\tilde f$ are close, in the sense that $\sup_{x\in [-1,1]} \left\vert f(x) - \tilde f(x) \right\vert$ is small, we know that $I^n_{[-1,1]}(f)$ and $I^n_{[-1,1]}(\tilde f)$ will also remain close, provided $\left( \sum_{k=0}^n \vert \omega_k\vert \right)$ does not become too large. In particular, if the weights $\omega_k$ are all nonnegative and the quadrature rule is of order at least $0$, we have that
\begin{align} \left\vert I^n_{[-1,1]}(f) - I^n_{[-1,1]}(\tilde f) \right\vert \leq 2 \sup_{x\in [-1,1]} \left\vert f(x) - \tilde f(x) \right\vert, \end{align}and that this estimate holds for all $n$. This for instance means that, even if the function $f$ is noisy, and there is a small error in each $f(x_k)$, the output of the quadrature rule will still be reliable. On the other hand, if $\sum_{k=0}^n \vert \omega_k\vert$ becomes very large, even small errors in $f$ could result in huge differences in the output of the quadrature rule. The precise mathematical notion to describe this property, which you may study in more details next year, is the conditioning of a problem.
 |
 |
Isaac Newton (1643 – 1727) and Roger Cotes (1682 - 1716). English mathematician, astronomer, theologian, author and physicist, Isaac Newton made breaking contributions to classical mechanics, optic and also contributed to infinitesimal calculus. Roger Cotes is an English mathematician known for closely working with Isaac Newton with whom he shares the discovery of the Newton-Cotes quadrature formulas for approximating integrals. This method extends the older rectangular and trapezoidal rules and is based on Lagrange polynomial interpolation on equidistant nodes.
The Newton-Cotes quadrature rules are the quadrature rules based on Lagrange interpolation with equidistant points.
In this course we mostly consider the so-called closed Newton-Cotes formula, meaning that we usually assume that the endpoints of the intgration interval are parts of the interpolation nodes (at least when $n\geq 1$).
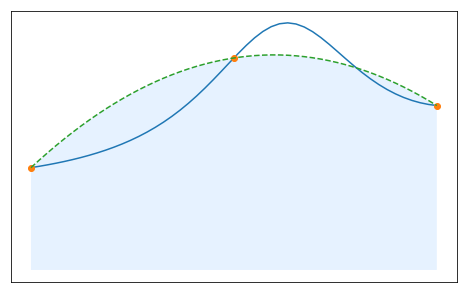
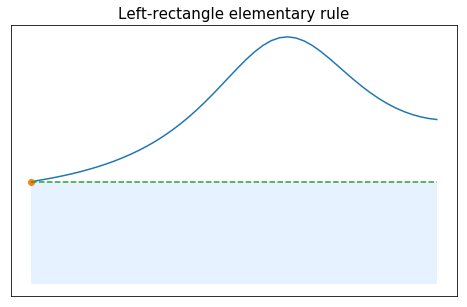
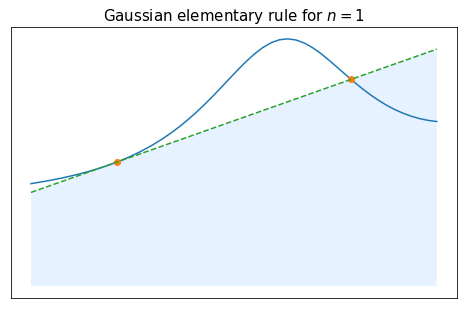
The very first method that can be designed uses 1 point. In that case, the unique node can be freely chosen. For example, it can be set to the left bound of the interval, giving $n=0$, $x_0=-1$ and $P_0(x)=f(x_0)$. The corresponding approximation of the integral is
$$ \int_{-1}^1f(x)dx \approx \int_{-1}^1 P_0(x)dx = 2 f(x_0), $$and the elementary rule is described by \begin{array}{c|c} x_k & -1 \\ \hline \omega_k& 2 \end{array}
This method is called the left rectangle rule since it approximate the integral of $f$ by the area of the rectangle based on the point $(x_0,f(x_0))$:
For $n=0$, another choice for the node could be the middle of the interval: $x_0=0$, leading to the rule
\begin{array}{c|c} x_k & 0 \\ \hline \omega_k& 2 \end{array}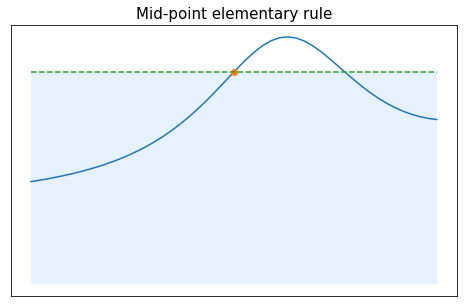
For $n=1$, the choice of equidistant nodes leads to $x_0=-1$ and $x_1=1$. The corresponding Lagrange interpolation polynomial is then given by
\begin{align} P_1(f)(x) &= f(x_0)\frac{x-x_1}{x_0-x_1}+f(x_1)\frac{x-x_0}{x_1-x_0}. \end{align}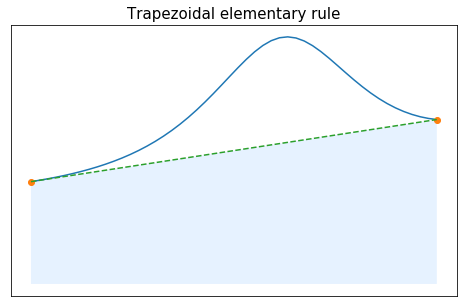
Compute the weights associated to this quadrature rule, and complete the table just below.
Starting from
\begin{align} P_1(f)(x) = -f(x_0)\frac{x-1}{2}+f(x_1)\frac{x+1}{2}, \end{align}we can simply compute the integral
\begin{align} \int_{-1}^1 P_1(f)(x)dx &= -f(x_0) \int_{-1}^1 \frac{x-1}{2} dx + f(x_1)\int_{-1}^1 \frac{x+1}{2} dx = f(x_0) + f(x_1), \end{align}which gives $\omega_0=1$ and $\omega_1=1$.
This quadrature rule is thus described by \begin{array}{c|cc} x_k & -1 & 1 \\ \hline \omega_k& 1 & 1 \end{array}
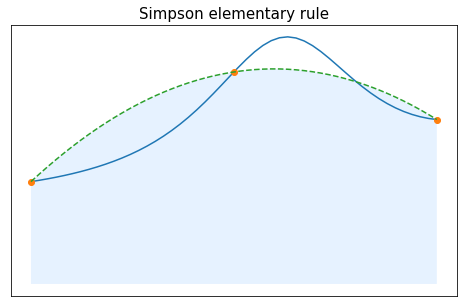
For $n=2$, the choice of equidistant nodes leads to $x_0=-1$, $x_1=0$ and $x_2=1$. The corresponding Lagrange interpolation polynomial is then given by
$$ P_2(f)(x)=f(x_0)\frac{(x-x_1)(x-x_2)}{(x_0-x_1)(x_0-x_2)}+f(x_1)\frac{(x-x_0)(x-x_2)}{(x_1-x_0)(x_1-x_2)}+f(x_2)\frac{(x-x_0)(x-x_1)}{(x_2-x_0)(x_2-x_1)}, $$and the corresponding approximation is
$$ \int_{-1}^1f(x)dx \approx \int_{-1}^1 P_2(f)(x)dx = \frac{1}{3}f(-1) + \frac{4}{3}f(0)+ \frac{1}{3}f(1). $$This quadrature rule is thus described by \begin{array}{c|cc} x_k & -1 & 0 & 1 \\ \hline \omega_k& \frac{1}{3} & \frac{4}{3} & \frac{1}{3} \end{array}
Fill the following cell to create the arrays $x$ and $w$ associated to each of the above-mentioned elementary quadrature rules.
# Left rectangle rule
x_LR = np.array([-1])
w_LR = np.array([2])
# Mid-point rule
x_MP = np.array([0])
w_MP = np.array([2])
# Trapezoidal rule
x_T = np.array([-1, 1])
w_T = np.array([1, 1])
# Simpson's rule
x_S = np.array([-1, 0, 1])
w_S = np.array([1/3, 4/3, 1/3])
Using the two cells below, give the order of accuracy of each of the quadrature rules. How does this order compare to the degree $n$ of the interpolation polynomial on which the rule is based (or equivalently, to the number $n+1$ of nodes used)?
def test_exactness(x, w, deg_max):
"""
Numerically checks up to which degree a give quadrature rule on [-1,1] is exact
-----------------------------------------------------
Inputs :
x, w: 1D array representing the quadrature rule (x=nodes and w=weights)
deg_max : maximal degree to be checked
Output :
comparison between int_{-1}^1 x^k and the quadrature rule applied to x^k, for k=0,...,deg_max
"""
for k in np.arange(0, deg_max+1):
theoretical_k = (1-(-1)**(k+1))/(k+1) # the exact value of int_{-1}^1 x^k
quad_k = QuadRule(lambda t: t**k, x, w) # the approximate value of int_{-1}^1 x^k given by the quadrature rule
print('int[-1,1] x^',k,' : exact value (4 digits) = ',"{:.4f}".format(theoretical_k), ', quadrature (4 digits) = ',"{:.4f}".format(quad_k),sep='')
return
print('Left rectanlge rule:')
test_exactness(x_LR, w_LR, 1)
print('\nMid-point rule:')
test_exactness(x_MP, w_MP, 2)
print('\nTrapeziodal rule:')
test_exactness(x_T, w_T, 2)
print("\nSimpson's rule:")
test_exactness(x_S, w_S, 4)
Left rectanlge rule: int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -2.0000 Mid-point rule: int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.0000 Trapeziodal rule: int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 2.0000 Simpson's rule: int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.6667
By linearity, checking that
$$ \int_{-1}^1 x^k dx = I_{[-1,1]}(x^k) \quad{} \text{for }k=0,\ldots,K, $$for a given quadrature rule $I_{[-1,1]}$, is enough to ensure that
$$ \int_{-1}^1 Q(x) dx = I_{[-1,1]}(Q) \quad{} \text{for all polynomial }Q\text{ of degree at most K}. $$The above computations suggest that
Since these quadrature rules are based on Lagrange interpolation, we already knew that their order of accuracy was at least $n$ (where $n+1$ is the number of nodes used). In some cases (left rectangle and trapezoidal rule) the order is actually equal to $n$ , but in some others (mid-point and Simpson's rule) the order is in fact equal to $n+1$.
The appearance of this extra degree of accuracy in some cases is explained by the following proposition.
Consider $n+1$ interpolation nodes $x_0<\ldots<x_n$ in $[-1,1]$, and the associated quadrature rule $I^n_{[-1,1]}$ based on Lagrange interpolation (which we already know to be of order at least $n$). If $n$ is even, and the nodes are symmetric with respect to $0$, then the rule is of order at least $n+1$.
Proof. $[\star]$ We already know that the rule is of order at least $n$, therefore it suffices to prove that $$ I_{[-1,1]}^n\left(x^{n+1}\right)=\int_{-1}^1 x^{n+1} d x $$
The integral is equal to 0 because $n+1$ is odd, and therefore we have to prove that $$ I_{[-1,1]}^n\left(x^{n+1}\right)=\sum_{k=0}^n \omega_k\left(x_k\right)^{n+1}=0 \text {. } $$
Since $n$ is even, we can write $n=2 m$ and split the sum $$ \begin{aligned} I_{[-1,1]}^n\left(x^{n+1}\right) & =\sum_{k=0}^{m-1} \omega_k\left(x_k\right)^{n+1}+\omega_m\left(x_m\right)^{n+1}+\sum_{k=m+1}^n \omega_k\left(x_k\right)^{n+1} \\ & =\omega_m\left(x_m\right)^{n+1}+\sum_{k=0}^{m-1}\left(\omega_k\left(x_k\right)^{n+1}+\omega_{n-k}\left(x_{n-k}\right)^{n+1}\right) \end{aligned} $$
By assumption, the nodes are symmetric with respect to 0 , meaning that $x_k=-x_{n-k}$ for $k=0, \ldots, m-1$ and $x_m=0$, therefore $$ I_{[-1,1]}^n\left(x^{n+1}\right)=\sum_{k=0}^{m-1}\left(\omega_k-\omega_{n-k}\right)\left(x_{n-k}\right)^{n+1} . $$
Besides, still using the symmetry assumption, we have for $k=0, \ldots, m-1$ $$ \begin{aligned} & L_k(x)=\prod_{\substack{0 \leq j \leq 2 m \\ j \neq k}} \frac{x-x_j}{x_k-x_j} \\ & =\left(\prod_{\substack{0 \leq j \leq m-1 \\ j \neq k}} \frac{x-x_j}{x_k-x_j} \frac{x-x_{n-j}}{x_k-x_{n-j}}\right) \frac{x-x_m}{x_k-x_m} \frac{x-x_{n-k}}{x_k-x_{n-k}} \\ & =\left(\prod_{\substack{0 \leq j \leq m-1 \\ j \neq k}} \frac{x+x_{n-j}}{-x_{n-k}+x_{n-j}} \frac{x+x_j}{-x_{n-k}+x_j}\right) \frac{x}{-x_{n-k}} \frac{x+x_k}{-x_{n-k}+x_k} \\ & =\left(\prod_{\substack{0 \leq j \leq m-1 \\ j \neq k}} \frac{-x-x_{n-j}}{x_{n-k}-x_{n-j}} \frac{-x-x_j}{x_{n-k}-x_j}\right) \frac{-x}{x_{n-k}} \frac{-x-x_k}{x_{n-k}-x_k} \\ & =\prod_{\substack{0 \leq j \leq 2 m \\ j \neq n-k}} \frac{-x-x_j}{x_k-x_j} \\ & =L_{n-k}(-x) \text {. } \\ & \end{aligned} $$
This shows that for $k=0, \ldots, m-1$ $$ \omega_k=\int_{-1}^1 L_k(x) d x=\int_{-1}^1 L_{n-k}(x) d x=\omega_{n-k} $$
Finally, we get $$ I_{[-1,1]}^n\left(x^{n+1}\right)=\sum_{k=0}^{m-1}\left(\omega_k-\omega_{n-k}\right)\left(x_{n-k}\right)^{n+1}=0 \text {, } $$ which ends the proof.
Coming back to our elementary Newton-Cotes quadrature rules, the situation can be summarized in the following table:
| elementary rule | degree $n$ | symmetry and $n$ even | order of accuracy $n_a$ |
|---|---|---|---|
| Left rectangle | $n=0$ | no | $n_a = 0$ |
| Mid-point | $n=0$ | yes | $n_a = 1$ |
| Trapezoidal | $n=1$ | no | $n_a = 1$ |
| Simpson | $n=2$ | yes | $n_a = 3$ |
Use these Newton-Cotes quadrature rules to approximate
$$ \int_{-1}^1 \cos\left(\frac{\pi}{2} x\right) dx = \frac{4}{\pi}. $$What could we try to get more precise results?
def f(x):
return np.cos(pi/2*x)
I = 4/pi
print("For the function f(x) = cos(pi/2 x), the integral between -1 and 1 is equal to 4\pi = %.8f" %I)
For the function f(x) = cos(pi/2 x), the integral between -1 and 1 is equal to 4\pi = 1.27323954
I_LR = QuadRule(f, x_LR, w_LR)
I_MP = QuadRule(f, x_MP, w_MP)
I_T = QuadRule(f, x_T, w_T)
I_S = QuadRule(f, x_S, w_S)
print("Approximation of the integral using the left rectangle quadrature rule : %.5f" % I_LR)
print("Approximation of the integral using the mid-point quadrature rule : %.5f" % I_MP)
print("Approximation of the integral using the trapezoidal quadrature rule : %.5f" % I_T)
print("Approximation of the integral using Simpson's quadrature rule : %.5f" % I_S)
Approximation of the integral using the left rectangle quadrature rule : 0.00000 Approximation of the integral using the mid-point quadrature rule : 2.00000 Approximation of the integral using the trapezoidal quadrature rule : 0.00000 Approximation of the integral using Simpson's quadrature rule : 1.33333
These first quadrature rules give results very far from the exact value of the integral, with only Simpson's rule being decent here (the relative error is still of roughly 5% in that case). In order to get more precise results with these Newton-Cotes rules, one could try to increase the number of nodes (which we are going to do now) or to split the interval into smaller subintervals (we study this option later in the notes). Another option would be to change the interpolation nodes (which we also consider later in the notes).
For Newton-Cotes quadrature rules with larger values of $n$, computing by hand the values of the weights $w_k$ starts to be somewhat painful, but fortunately we can get them from an existing python function.
def coeffs_NewtonCotes(n):
"""
computation of the nodes and weights for the Newton-Cotes quadrature rule at any order
---------------------------------
Inputs :
n: degree of the rule (we want n+1 nodes)
Outputs:
x, w: 1D array containing the nodes and the weights
"""
if n==0: # we take the mid-point rule
x = np.array([0.])
w = np.array([2.])
else:
x = np.linspace(-1, 1, n+1) # n+1 equidistant nodes
w, err = newton_cotes(n, equal=1) # Using the newton_cotes funtion from scipy.integrate (does not work for n=0)
w = w*2/n # rescaling, scipy's function gives the weights for nodes in [0,n] rather than [-1,1]
return x, w
Have a look at the weights for the first few values of $n$. What seems to happens when $n\geq 10$?
np.set_printoptions(precision=1) #to print less digits and have everyhting fitting on one line
for n in np.arange(0, 13):
x_n, w_n = coeffs_NewtonCotes(n)
print(n, w_n)
np.set_printoptions(precision=8) #back to the default number of digits printed
0 [2.] 1 [1. 1.] 2 [0.3 1.3 0.3] 3 [0.2 0.8 0.8 0.2] 4 [0.2 0.7 0.3 0.7 0.2] 5 [0.1 0.5 0.3 0.3 0.5 0.1] 6 [0.1 0.5 0.1 0.6 0.1 0.5 0.1] 7 [0.1 0.4 0.2 0.3 0.3 0.2 0.4 0.1] 8 [ 0.1 0.4 -0.1 0.7 -0.3 0.7 -0.1 0.4 0.1] 9 [0.1 0.4 0. 0.4 0.1 0.1 0.4 0. 0.4 0.1] 10 [ 0.1 0.4 -0.2 0.9 -0.9 1.4 -0.9 0.9 -0.2 0.4 0.1] 11 [ 0. 0.3 -0.1 0.6 -0.2 0.4 0.4 -0.2 0.6 -0.1 0.3 0. ] 12 [ 0. 0.3 -0.2 1.1 -1.6 2.8 -2.8 2.8 -1.6 1.1 -0.2 0.3 0. ]
For $n=8$ we see the appearance of negative weights, and there seems to always be some negative weights when $n\geq 10$.
Study graphically the behavior of $\sum_{k=0}^n \vert \omega_k \vert$ when $n$ increases.
nmax = 100
tab_n = np.arange(0, nmax+1)
tab_sum = np.zeros(nmax+1)
# for n = 0,...,nmax, computation of sum_{k=0}^n |w_k|
for n in tab_n:
x_n, w_n = coeffs_NewtonCotes(n)
tab_sum[n] = np.sum(np.abs(w_n))
#plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_sum, marker="o")
plt.xlabel('n', fontsize = 18)
plt.title('Evolution of $\sum_{k=0}^n |\omega_k|$ for Newton-Cotes rules', fontsize = 18)
plt.ylabel('$\sum_{k=0}^n |\omega_k|$', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

We see that $\sum_{k=0}^n \vert \omega_k \vert$ quickly becomes quite large when $n$ increases, which is made possible by the fact that some of the weights are negative. This does not necessarily mean that with the Newton-Cotes quadrature rule $I^n_{[-1,1]}(f)$ cannot converge to $\int_{-1}^1 f(x) dx$, but we should probably be a bit wary and study some examples.
Consider again the function $f(x)=\cos\left(\frac{\pi}{2} x\right)$, and study graphically the convergence of $I^n_{[-1,1]}(f)$ to $\int_{-1}^1 f(x) dx$ for Newton-Cotes quadrature. Comment on the obtained results.
nmax = 30
tab_n = np.arange(0, nmax+1)
tab_In = np.zeros(nmax+1)
I = 4/pi # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_n, w_n = coeffs_NewtonCotes(n)
tab_In[n] = QuadRule(f, x_n, w_n)
# computation of the error
tab_err = np.abs(tab_In - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 \cos(\pi/2 x) dx$ using Newton-Cotes rules', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

For the function $f(x) = \cos\left(\frac{\pi}{2} x\right)$, we know from the last chapter that even for equidistant nodes the Lagrange interpolation polynomial $P_n(f)$ converges uniformly to $f$ on $[-1,1]$. Therefore, the approximation of the integral obtained using the Newton-Cotes rule is supposed to converge to the exact value. This is indeed what we observe at first, but then rounding errors start to kick in and the error grows again.
Consider now Runge's function $f_{Runge}(x)=\frac{1}{1+25x^2}$, and study graphically the convergence of $I^n_{[-1,1]}(f_{Runge})$ to $\int_{-1}^1 f_{Runge}(x) dx$ for Newton-Cotes quadrature. Comment on the obtained results. Hint: to obtain the error, you can use the fact that $\int_{-1}^1 f_{Runge}(x) dx = \frac{2}{5} \arctan (5)$.
def f_Runge(x):
return 1/(1+25*x**2)
nmax = 30
tab_n = np.arange(0, nmax+1)
tab_In = np.zeros(nmax+1)
I = 2/5 * atan(5) # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_n, w_n = coeffs_NewtonCotes(n)
tab_In[n] = QuadRule(f_Runge, x_n, w_n)
# computation of the error
tab_err = np.abs(tab_In - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 1/(1+25x^2) dx$ using Newton-Cotes rules', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

This time the approximation of the integral obtained using the Newton-Cotes rule does not seem to converge at all to the exact value. This is not so surprising since this approximation is obtained by integrating the Lagrange interpolation polynomial $P_n(f)$ for equidistant nodes, and we saw in the last chapter that, for Runge's function and equidistant nodes, $P_n(f)$ does not converge to $f$.
Based on what we have seen in the previous chapter, we can expect quadrature rules based on Lagrange interpolation to behave better if we take Chebyshev nodes instead of equidistant ones. We investigate this option below.
The Clenshaw-Curtis quadrature rules are the quadrature rules based on Lagrange interpolation with Chebyshev nodes.
As in the previous chapter, we only work with the Chebyshev points of the first kind
$$ \hat{x}_k = \cos\left(\frac{2k + 1}{2n+2}\pi\right), \qquad{} 0 \leq k \leq n, $$but he Chebyshev points of the second kind
$$ \hat{y}_k = \cos\left(\frac{k}{n}\pi\right), \qquad{} 0 \leq k \leq n, $$could also be used.
We know that, as soon as the function $f$ is slightly regular (say $C^1$), the interpolation polynomial at the Chebyshev nodes converges uniformly on $[-1,1]$ to $f$, which implies that the Clenshaw-Curtis approximation $I^n_{[-1,1]}(f)$ converges to $\int_{-1}^1f(x) dx$. In fact, it can be shown that the Clenshaw-Curtis approximation $I^n_{[-1,1]}(f)$ converges to $\int_{-1}^1f(x) dx$ for any continuous function.
It only remains to find a way to compute the weights of the Clenshaw-Curtis quadrature rule, so that we can easily use it in practice.
Let $V_n$ be the Vandermonde matrix associated with the Chebyshev nodes
$$ V_n=\left(\begin{array}{ccccc} 1 & \hat x_0 & \hat x_0^2 & \ldots & \hat x_0^n \\ 1 & \hat x_1 & \hat x_1^2 & \ldots & \hat x_1^n \\ \vdots & & & &\vdots \\ 1 & \hat x_n & \hat x_n^2 & \ldots & \hat x_n^n \end{array}\right), $$define
$$ b_k = \frac{1 + (-1)^k}{k+1}, \qquad{} k=0,\ldots,n, $$and $b=\left(b_k\right)_{0\leq k\leq n} \in \mathbb{R}^{n+1}$. Then, the vector $\omega=\left(\omega_k\right)_{0\leq k\leq n} \in \mathbb{R}^{n+1}$ containing the weights of the Clenshaw-Curtis quadrature rule with $n+1$ points satisfies
$$ {}^t V_n\, \omega = b. $$Proof. $[\star]$ By definition, the Clenshaw-Curtis quadrature of a function $f$ on $[-1,1]$ is given by $$ I_{[-1,1]}^n(f)=\int_{-1}^1 P_n(f)(x) d x=\sum_{k=0}^n f\left(\hat{x}_k\right) \omega_k, $$ where $P_n(f)$ is the interpolation polynomial of $f$ at the Chebyshev nodes, and $\omega_k$ are the weights we want to determine. In the last chapter, we saw that $$ P_n(f)(x)=\sum_{k=0}^n a_k x^k $$ where the vector $a=\left(a_k\right)_{0 \leq k \leq n}$ satisfies $$ V_n a=f(\hat{x}) $$ with $f(\hat{x})=\left(f\left(\hat{x}_k\right)\right)_{0 \leq k \leq n}$. Therefore, $$ \begin{aligned} I_{[-1,1]}^n(f) & =\int_{-1}^1 \sum_{k=0}^n a_k x^k d x \\ & =\sum_{k=0}^n a_k \int_{-1}^1 x^k d x \\ & =\sum_{k=0}^n a_k b_k \end{aligned} $$ which we can also write $$ I_{[-1,1]}^n(f)={ }^t a b $$
Then, using that $a=V_n^{-1} f(\hat{x})$, we get $$ \begin{aligned} I_{[-1,1]}^n(f) & ={ }^t f(\hat{x})^t V_n^{-1} b \\ & =\sum_{k=0}^n f\left(\hat{x}_k\right)\left({ }^t V_n^{-1} b\right)_k \end{aligned} $$ and the weights $\omega=\left(\omega_k\right)_{0 \leq k \leq n}$ are indeed given by ${ }^t V_n{ }^{-1} b$.
The above proposition gives us an easy way of computing the weights for Clenshaw-Curtis quadrature.
There are better ways (i.e. less expensive and more stable ways) of computing these weights, but the required algorithms are slightly more involved. You can find more details in the supplementary material.
Complete the following cell to get a function which computes the nodes and the weights for the Clenshaw-Curtis quadrature of any degree $n$, based on the previous proposition. Hints: You may want to reuse pieces of code or even full functions from the previous chapter. Check the output of your code for $n=1$ and $n=2$, where you should get approximately $\omega = \left(1,1\right)$ and $\omega = \left(4/9, 10/9, 4/9\right)$ respectively.
def xhat(n):
"""
function returning the zeros of Tn
-----------------------
Inputs:
n : the degree of Tn
Output:
1D array containing \hat{x}_k for k=0,...,n-1
"""
if n == 0:
return np.array([])
else:
x = np.cos( (2*np.arange(0,n)+1)*np.pi / (2*n) )
return x
def coeffs_ClenshawCurtis(n):
"""
computation of the nodes and weights for the Clenshaw-Curtis quadrature rule at any order
---------------------------------
Inputs :
n: degree of the rule (we want n+1 nodes)
Outputs:
x, w: 1D array containing the nodes and the weights
"""
x = xhat(n+1) # n+1 Chebyshev nodes
tab_k = np.arange(0, n+1, dtype='float')
b = (( 1 + (-1)**tab_k) / (tab_k + 1))
M = np.vander(x, increasing=True)
w = np.linalg.solve(np.transpose(M), b)
return x, w
#Sanity check
x_1, w_1 = coeffs_ClenshawCurtis(1)
print(1, x_1, w_1)
x_2, w_2 = coeffs_ClenshawCurtis(2)
print(2, x_2, w_2)
1 [ 0.70710678 -0.70710678] [1. 1.] 2 [ 8.66025404e-01 6.12323400e-17 -8.66025404e-01] [0.44444444 1.11111111 0.44444444]
Have a look at the weights for Clenshaw-Curtis quadrature for the first few values of $n$. How does it compare to what you obtained for Newton-Cotes quadrature.
np.set_printoptions(precision=1) #to print less digits and have everyhting fitting on one line
for n in np.arange(0, 17):
x_n, w_n = coeffs_ClenshawCurtis(n)
print(n, w_n)
np.set_printoptions(precision=8) #back to the default number of digits printed
0 [2.] 1 [1. 1.] 2 [0.4 1.1 0.4] 3 [0.3 0.7 0.7 0.3] 4 [0.2 0.5 0.6 0.5 0.2] 5 [0.1 0.4 0.5 0.5 0.4 0.1] 6 [0.1 0.3 0.4 0.5 0.4 0.3 0.1] 7 [0.1 0.2 0.3 0.4 0.4 0.3 0.2 0.1] 8 [0.1 0.2 0.3 0.3 0.3 0.3 0.3 0.2 0.1] 9 [0. 0.1 0.2 0.3 0.3 0.3 0.3 0.2 0.1 0. ] 10 [0. 0.1 0.2 0.2 0.3 0.3 0.3 0.2 0.2 0.1 0. ] 11 [0. 0.1 0.2 0.2 0.2 0.3 0.3 0.2 0.2 0.2 0.1 0. ] 12 [0. 0.1 0.1 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.1 0.1 0. ] 13 [0. 0.1 0.1 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.1 0.1 0. ] 14 [0. 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.1 0.1 0.1 0. ] 15 [0. 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.1 0.1 0.1 0. ] 16 [0. 0.1 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.2 0.2 0.2 0.1 0.1 0.1 0.1 0. ]
Actually, this can be proven (although we will not give the proof in this course).
For any integer $n$, the weights $\omega_k$ ($k=0,..,n$) of the Clenshaw-Curtis quadrature rule of degree $n$ are all positive.
For Clenshaw-Curtis quadrature, study graphically the behavior of $\sum_{k=0}^n \vert \omega_k \vert$ when $n$ increases.
nmax = 48
tab_n = np.arange(0, nmax+1)
tab_sum = np.zeros(nmax+1)
# for n = 0,...,nmax, computation of sum_{k=0}^n |w_k|
for n in tab_n:
x_n, w_n = coeffs_ClenshawCurtis(n)
tab_sum[n] = np.sum(np.abs(w_n))
#plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_sum, marker="o")
plt.xlabel('n', fontsize = 18)
plt.title('Evolution of $\sum_{k=0}^n |\omega_k|$ for Clenshaw-Curtis rules', fontsize = 18)
plt.ylabel('$\sum_{k=0}^n |\omega_k|$', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

After a while ($n>43$), $\sum_{k=0}^n \vert \omega_k \vert$ also becomes significantly larger than $2$. Since in theory we should always have $\sum_{k=0}^n \vert \omega_k \vert = 2$, this must be due to rounding errors, and could be mitigated by using a better algorithm to compute the weights.
Consider again the function $f(x)=\cos\left(\frac{\pi}{2} x\right)$, and study graphically the convergence of $I^n_{[-1,1]}(f)$ to $\int_{-1}^1 f(x) dx$, this time for Clenshaw-Curtis quadrature. Comment on the obtained results.
nmax = 100
tab_n = np.arange(0, nmax+1)
tab_In = np.zeros(nmax+1)
I = 4/pi # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_n, w_n = coeffs_ClenshawCurtis(n)
tab_In[n] = QuadRule(f, x_n, w_n)
# computation of the error
tab_err = np.abs(tab_In - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 \cos(\pi/2 x) dx$ using Clenshaw-Curtis rules', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

We observe the convergence of the approximation obtained using the Clenshaw-Curtis rule to the exact value of the integral, as expected. Of course the error saturates at some point due to rounding errors, but contrarily to what happened with the Newton-Cotes rule, the error does not dramatically increase when the rounding errors kick in.
Consider now Runge's function $f_{Runge}(x)=\frac{1}{1+25x^2}$, and study graphically the convergence of $I^n_{[-1,1]}(f_{Runge})$ to $\int_{-1}^1 f_{Runge}(x) dx$ for Clenshaw-Curtis quadrature. Comment on the obtained results. Hint: to obtain the error, you can use the fact that $\int_{-1}^1 f_{Runge}(x) dx = \frac{2}{5} \arctan (5)$.
def f_Runge(x):
return 1/(1+25*x**2)
nmax = 100
tab_n = np.arange(0, nmax+1)
tab_In = np.zeros(nmax+1)
I = 2/5 * atan(5) # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_n, w_n = coeffs_ClenshawCurtis(n)
tab_In[n] = QuadRule(f_Runge, x_n, w_n)
# computation of the error
tab_err = np.abs(tab_In - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 1/(1+25x^2) dx$ using Clenshaw-Curtis rules', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

We again observe convergence at first, which was not the case for Newton-Cotes quadrature on this example. This time the rounding errors affect the result more strongly when $n$ increases (this could be mitigated by using a better algorithm for computing the weights).

Carl Friedrich Gauss (1777 - 1855). Carl Freidrich Gauss is a German mathematician, astronomer and physicist. He made significant contributions to these three fields, including algebra, analysis, optics, mechanics, magnetic fields, matrix theory, statistics... He had a great influence in many fields of science and is sometime referred to as the Princeps mathematicorum. Concerning numerical integration, he developed a $(n+1)$-point quadrature method yielding an exact result for polynomials of degree $2n+1$.
At the beginning of this chapter, we obtained the following estimate for a quadrature rule of order of accuracy at least $n_a$
$$ \left\vert \int_{-1}^{1} f(x)dx - I^n_{[-1,1]}(f)\,\right\vert \leq \frac{2+\sum_{k=0}^n |\omega_k| }{(n_a+1)!}\sup_{x\in [-1,1]} \left\vert \,f^{(n_a+1)}(x)\,\right\vert, $$which suggests that it may be a good idea to find quadrature rules having the highest possible order of accuracy.
Check numerically the order of accuracy of Clenshaw-Curtis quadrature for the first few values of $n$, using the function test_exactness.
for n in np.arange(0,5):
print("n = %s" %n)
x, w = coeffs_ClenshawCurtis(n)
test_exactness(x, w, n+2)
print("\n")
n = 0 int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.0000 n = 1 int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 1.0000 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 n = 2 int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.5000 n = 3 int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.4167 int[-1,1] x^5 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 n = 4 int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.4000 int[-1,1] x^5 : exact value (4 digits) = 0.0000, quadrature (4 digits) = -0.0000 int[-1,1] x^6 : exact value (4 digits) = 0.2857, quadrature (4 digits) = 0.2917
While Clenshaw-Curtis quadrature already performs much better than Newton-Cotes quadrature, both have the same order of accuracy, namely $n_a=n+1$ when $n$ is even, and $n_a=n$ when $n$ is odd, $n$ being the degree of the quadrature rule (i.e. when we use $n+1$ nodes).
However, when constructing a quadrature rule of degree $n$:
$$ I^n_{[-1,1]}(f) = \sum_{k=0}^n f(x_k) \omega_k, $$we have $2n+2$ degrees of freedom, or if you prefer $2n+2$ parameters than we can choose, namely the $n+1$ nodes $x_0,\ldots,x_n$ and the $n+1$ weights $\omega_0,\ldots,\omega_n$. This suggests that we could try to satisfy $2n+2$ constraints, and for instance try to have
$$ I^n_{[-1,1]}(X^j) = \int_{-1}^1 x^j dx \qquad{} j=0,\ldots,2n+1, $$which would give us a rule having an order of accuracy of at least $2n+1$.
In that case, we have to find $x_0$, $x_1$, $\omega_0$, $\omega_1$ such that
$$ \int_{-1}^1 P(x) dx = \omega_0 P(x_0) + \omega_1 P(x_1) \quad{} \text{for}\quad{} P(x)=1,\, P(x)=x,\, P(x)=x^2 \text{ and } P(x)=x^3. $$This provides the following 4 equations with 4 unknowns to be solved for $(x_0,x_1,\omega_0,\omega_1)$:
\begin{align} \left\{ \begin{aligned} 2 & = \omega_0 + \omega_1 \\ 0 & = \omega_0\,x_0 + \omega_1\,x_1 \\ \frac{2}{3} & = \omega_0\,x_0^2 + \omega_1\,x_1^2 \\ 0 & = \omega_0\,x_0^3 + \omega_1\,x_1^3 \end{aligned} \right. \end{align}Find a solution to the above system. Hint: you may look for a solution with symmetric nodes, that is such that $x_0 = - x_1$ and $\omega_0 = \omega_1$.
Using the hint, the first equation yields $2=2\omega_0$, i.e. $\omega_0=1$. The second equation is automatically satisfied with the symmetry assumptions. The third equation yields $\frac{2}{3} = 2 x_0^2$, i.e. $x_0 = \sqrt{\frac{1}{3}}$. The fourth equation is also automatically satisfied with the symmetry assumptions.
We finally end up with the following rule:
\begin{array}{c|cc} x_k & -\frac{1}{\sqrt 3} & \frac{1}{\sqrt 3} \\ \hline \omega_k& 1 & 1 \end{array}Create the arrays $x$ and $\omega$ corresponding to this rule, and check numerically the order of accuracy.
# Gaussian quadrature of degree 1
x_G1 = np.array([-1/sqrt(3), 1/sqrt(3)]) # nodes
w_G1 = np.array([1, 1]) # weights
test_exactness(x_G1, w_G1, 4)
int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.2222
In that case, we have to find $x_0$, $x_1$, $x_2$, $\omega_0$, $\omega_1$, $\omega_2$ such that
$$ \int_{-1}^1 P(x) dx = \omega_0 P(x_0) + \omega_1 P(x_1) + \omega_2 P(x_2). $$$$ \text{for}\quad{} P(x)=1,\, P(x)=x,\, P(x)=x^2 \, P(x)=x^3 \, P(x)=x^4 \text{ and } P(x)=x^5. $$As before, we can look for a symmetric nodes, i.e. such that
$$ x_0 = - x_2,\quad{} x_1 = 0,\quad{} \text{and}\quad \omega_0 = \omega_2. $$After some computations (feel free to try and do them as an exercise if you want), we end up with the following coefficients:
\begin{array}{c|cc} x_k & -\sqrt{\frac{3}{5}} & 0 & \sqrt{\frac{3}{5}} \\ \hline \omega_k & \frac{5}{9} & \frac{8}{9} & \frac{5}{9} \end{array}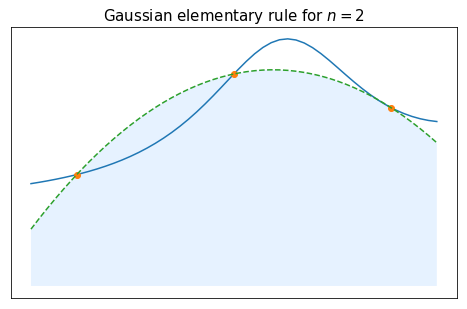
Create the arrays $x$ and $\omega$ corresponding to this rule, and check numerically the order of accuracy.
# Gaussian quadrature of degree 2
x_G2 = np.array([-sqrt(3/5), 0, sqrt(3/5)]) # nodes
w_G2 = np.array([5/9, 8/9, 5/9]) # weights
test_exactness(x_G2, w_G2, 6)
int[-1,1] x^0 : exact value (4 digits) = 2.0000, quadrature (4 digits) = 2.0000 int[-1,1] x^1 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^2 : exact value (4 digits) = 0.6667, quadrature (4 digits) = 0.6667 int[-1,1] x^3 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^4 : exact value (4 digits) = 0.4000, quadrature (4 digits) = 0.4000 int[-1,1] x^5 : exact value (4 digits) = 0.0000, quadrature (4 digits) = 0.0000 int[-1,1] x^6 : exact value (4 digits) = 0.2857, quadrature (4 digits) = 0.2400
As a first test for Gaussian quadrature rules, consider again the function $f(x)=\cos\left(\frac{\pi}{2} x\right)$, and its integral on $[-1,1]$. For a given degree $n=2$ (i.e. with 3 nodes), compare the approximate results obtained with Newton-Cotes quadrature, Clenshaw-Curtis quadrature and Gaussian quadrature.
def f(x):
return np.cos(pi/2*x)
I = 4/pi # exact value of the integral of f from -1 to 1
n = 2
x_NC, w_NC = coeffs_NewtonCotes(n) # coefficients for the Newton-Cotes quadrature
x_CC, w_CC = coeffs_ClenshawCurtis(n) # coefficients for the Clenshaw-Curtis quadrature
I_NC = QuadRule(f, x_NC, w_NC) # approximate integral with Newton-Cotes quadrature
I_CC = QuadRule(f, x_CC, w_CC) # approximate integral with Clenshaw-Curtis quadrature
I_G = QuadRule(f, x_G2, w_G2) # approximate integral with Gaussian quadrature
print("Exact value of the integral : %.5f" % I)
print("Approximation of the integral using Newton-Cotes quadrature rule : %.5f" % I_NC)
print("Approximation of the integral using Clenshaw-Curtis quadrature rule : %.5f" % I_CC)
print("Approximation of the integral using Gaussian quadrature rule : %.5f" % I_G)
Exact value of the integral : 1.27324 Approximation of the integral using Newton-Cotes quadrature rule : 1.33333 Approximation of the integral using Clenshaw-Curtis quadrature rule : 1.29680 Approximation of the integral using Gaussian quadrature rule : 1.27412
In all three cases we use the same number of nodes (and therefore we need the same number of evaluations of $f$), but Gaussian quadrature gives a more precise result, which is what we were hopping for when trying to obtain a rule with a higher order of accuracy.
Let us now consider the general case. The integer $n$ being given, one wants to find nodes $x_0,\ldots,x_n$ and weights $\omega_0,\ldots,\omega_n$ such that the associated quadrature rule
$$ I^n_{[-1,1]}(f) = \sum_{k=0}^n f(x_k) \omega_k, $$is of order at least $n_a=2n+1$.
Suppose for the moment that such coefficients exist, and consider $\Pi(x)=(x-x_0)(x-x_1)\ldots(x-x_n)$ which is a polynomial of degree $n+1$. Then, for any polynomial $P$ of degree lower or equal to $n$ we have that $P\Pi$ is a polynomial of degree lower or equal to $n_a$. As a consequence we have
$$ \int_{-1}^1 P(x)\Pi(x) dx = I^n_{[-1,1]} (P\,\Pi) = \sum_{k=0}^n \omega_k P(x_k)\Pi(x_k) = 0. $$Therefore, for any polynomial $P$ of degree $n$ or less, we have
$$ \int_{-1}^1 P(x)\Pi(x) dx =0. $$This property encourages us to consider so-called orthogonal polynomials.
Legendre orthogonal polynomials. There exists a unique family of polynomials $\left(Q_n\right)_{n\geq 0}$ verifying
These polynomials are called the Legendre polynomials. It can be proven that they have $n$ distinct roots in $(-1,1)$.
Notice that the polynomial $\Pi$ defined just above is of degree $n+1$ and satisfies $\displaystyle \int_{-1}^1 P(x) \Pi(x) dx = 0$ for any polynomial $P$ of degree at most $n$. Therefore, one could try taking $\Pi = Q_{n+1}$, that is using the roots of the $n+1$-th Legendre polynomial $Q_{n+1}$ as the quadrature nodes.
The Gaussian (or Gauss-Legendre) quadrature rules are the quadrature rules based on Lagrange interpolation for which the $n+1$ nodes are the roots of the $n+1$-th Legendre polynomial $Q_{n+1}$.
We prove below that this choice indeed leads to a quadrature rule of order of accuracy $n_a=2n+1$.
The Gaussian (or Gauss-Legendre) quadrature rule of degree $n$ (i.e. with $n+1$ nodes) is of order of accuracy $n_a=2n+1$.
Proof. Proof. $[\star]$ We first have to prove that $Q_{n+1}$ has $n+1$ distinct roots in $(-1,1)$. Let us assume by contradiction that $Q_{n+1}$ has $d+1<n+1$ distinct roots $x_0, \ldots, x_d$ in $(-1,1)$. This means we can write $$ Q_{n+1}(x)=R(x) \prod_{k=0}^d\left(x-x_k\right)^{a_k}, $$ where $R$ is a polynomial having no roots in $(-1,1)$, and $\alpha_k \geq 1, k=0, \ldots, d$. We are going to reach a contradiction by using the fact that $$ \int_{-1}^1 P(x) Q_{n+1} d x=0 $$ for all polynomials of degree at most $n$. Indeed, let us consider $$ P(x)=\prod_{k=0}^d\left(x-x_k\right)^{\beta_k} $$ where $$ \beta_k= \begin{cases}1 & \text { if } \alpha_k \text { is odd } \\ 0 & \text { if } \alpha_k \text { is even. }\end{cases} $$
This polynomial is of degree at most $n$ because we assumed $d<n$, and therefore $$ \begin{aligned} 0 & =\int_{-1}^1 \prod_{k=0}^d\left(x-x_k\right)^{\beta_k} Q_{n+1}(x) d x \\ & =\int_{-1}^1 \prod_{k=0}^d\left(x-x_k\right)^{\alpha_k+\beta_k} R(x) d x . \end{aligned} $$
However, $\prod_{k=0}^d\left(x-x_k\right)^{\alpha_k+\beta_k}$ is nonnegative $\left(\alpha_k+\beta_k\right.$ is even for all $k$ ) and $R$ has a constant sign on $(-1,1)$ (it does not have any zero in $(-1,1))$, therefore the integral cannot be equal to 0 , contradiction.
Now that we have shown that $Q_{n+1}$ has $n+1$ distinct roots in $(-1,1)$, let us prove that the quadrature rule based on Lagrangian interpolation at these nodes is of order at least $2 n+1$. Let $P$ be a polynomial of degree lower or equal to $2 n+1$, and let us consider the euclidean division of $P$ by the $n+1$-th Legendre polynomial $Q_{n+1}$ : $$ P=A Q_{n+1}+B \quad \text { with } \quad B \text { of degree at most } n \text {. } $$
From the degrees of $Q_{n+1}$ and $P$ we have that the degree of $A$ is lower or equal to $n$, and therefore $$ \int_{-1}^1 P(x) d x=\int_{-1}^1 A(x) Q_{n+1}(x) d x+\int_{-1}^1 B(x) d x=\int_{-1}^1 B(x) d x . $$
Moreover, since the quadrature points $\left(x_k\right)$ are the roots of $Q_{n+1}$, we have $$ I_{[-1,1]}^n(P)=\sum_{k=0}^n P\left(x_k\right) \omega_k=\sum_{k=0}^n\left(A\left(x_k\right) Q_{n+1}\left(x_k\right)+B\left(x_k\right)\right) \omega_k=\sum_{k=0}^n B\left(x_k\right) \omega_k=I_{[-1,1]}^n(B) . $$
Finally, since the quadrature rule is based on Lagrange interpolation, it is exact for polynomials of degree $n$, and therefore $I_{[-1,1]}^n(B)=\int_{-1}^1 B(x) d x$. Putting everything together, we get $$ \int_{-1}^1 P(x) d x=\int_{-1}^1 B(x) d x=I_{[-1,1]}(B)=I_{[-1,1]}(P) . $$ and the quadrature rule is indeed of order at least $2 n+1$. It remains to prove that the order of accuracy is exactly equal to $2 n+1$. To do so, we consider the polynomial $P(x)=\left(x-x_0\right)^2\left(x-x_1\right)^2 \ldots\left(x-x_n\right)^2$ of degree $2 n+2$, for which we have $$ I_{[-1,1]}^n(P)=\sum_{k=0}^n \omega_k P\left(x_k\right)=0 \neq \int_{-1}^1 P(x) d x, $$ because $P$ is nonnegative.
The nodes and weights for the Gauss-Legendre quadrature can be obtained using the funciong roots_legendre from scipy.special.
def coeffs_GaussLegendre(n):
"""
computation of the nodes and weights for the Gaussian (or Gauss-Legendre) quadrature rule at any order
---------------------------------
Inputs :
n: degree of the rule (we want n+1 nodes)
Outputs:
x, w: 1D array containing the nodes and the weights
"""
return roots_legendre(n+1)
#Sanity check
x_1, w_1 = coeffs_GaussLegendre(1)
print(1, x_1, w_1)
x_2, w_2 = coeffs_GaussLegendre(2)
print(2, x_2, w_2)
1 [-0.57735027 0.57735027] [1. 1.] 2 [-0.77459667 0. 0.77459667] [0.55555556 0.88888889 0.55555556]
For the Gauss-Legendre quadrature, all the weights $\omega_k$ are positive for all $n$.
For the Gauss-Legendre quadrature, study graphically the behavior of $\sum_{k=0}^n \vert \omega_k \vert$ when $n$ increases.
nmax = 200
tab_n = np.arange(0, nmax+1)
tab_sum = np.zeros(nmax+1)
# for n = 0,...,nmax, computation of sum_{k=0}^n |w_k|
for n in tab_n:
x_n, w_n = coeffs_GaussLegendre(n)
tab_sum[n] = np.sum(np.abs(w_n))
#plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_sum, marker="o")
plt.xlabel('n', fontsize = 18)
plt.title('Evolution of $\sum_{k=0}^n |\omega_k|$ for Gauss-Legendre rules', fontsize = 18)
plt.ylabel('$\sum_{k=0}^n |\omega_k|$', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

As expected, since all the weights $\omega_k$ are supposed to be positive, $\sum_{k=0}^n \vert \omega_k \vert$ stays equal to $2$ for all $n$. Apparently, the algorithm used by scipy for computing these weights is more stable than the one we used for Clenshaw-Curtis quadrature, because we do not seem to have problems with rounding errors.
Consider again the function $f(x)=\cos\left(\frac{\pi}{2} x\right)$, and study graphically the convergence of $I^n_{[-1,1]}(f)$ to $\int_{-1}^1 f(x) dx$, both for Clenshaw-Curtis quadrature and for Gauss-Legendre quadrature.
nmax = 25
tab_n = np.arange(0, nmax+1)
tab_InCC = np.zeros(nmax+1)
tab_InGL = np.zeros(nmax+1)
I = 4/pi # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_nCC, w_nCC = coeffs_ClenshawCurtis(n)
tab_InCC[n] = QuadRule(f, x_nCC, w_nCC)
x_nGL, w_nGL = coeffs_GaussLegendre(n)
tab_InGL[n] = QuadRule(f, x_nGL, w_nGL)
# computation of the error
tab_errCC = np.abs(tab_InCC - I)
tab_errGL = np.abs(tab_InGL - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_errCC, marker="o", label="Clenshaw-Curtis rule")
plt.plot(tab_n, tab_errGL, marker="o", label="Gauss-Legendre rule")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 \cos(\pi/2 x) dx$', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

For both quadrature rules, we observe the convergence to the exact value of the integral, as expected, and the convergence seems to be even faster with the Gauss-Legendre rule.
Repeat this comparison, this time with the function $f_{Runge}(x)=\frac{1}{1+25x^2}$.
def f_Runge(x):
return 1/(1+25*x**2)
nmax = 40
tab_n = np.arange(0, nmax+1)
tab_InCC = np.zeros(nmax+1)
tab_InGL = np.zeros(nmax+1)
I = 2/5 * atan(5) # exact value
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_nCC, w_nCC = coeffs_ClenshawCurtis(n)
tab_InCC[n] = QuadRule(f_Runge, x_nCC, w_nCC)
x_nGL, w_nGL = coeffs_GaussLegendre(n)
tab_InGL[n] = QuadRule(f_Runge, x_nGL, w_nGL)
# computation of the error
tab_errCC = np.abs(tab_InCC - I)
tab_errGL = np.abs(tab_InGL - I)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_errCC, marker="o", label="Clenshaw-Curtis rule")
plt.plot(tab_n, tab_errGL, marker="o", label="Gauss-Legendre rule")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| I^n(f) - I |$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $ I = \int_{-1}^1 1/(1+25x^2) dx$', fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

On this example, there is no noticeable difference regarding the rate of convergence.
We re-emphasize that the fact that rouding errors seems more impactful for Clenshaw-Curtis quadrature has nothing to do with the quadrature rule itself, only with the algorithms that are used to compute the weights.
The fact that both quadrature rules have rather similar properties is not a coincidence: The nodes are actually not that different, and distributed in a similar fashion, as can be seen in the next picture.
n = 20
x_CC, w_CC = coeffs_ClenshawCurtis(n)
x_GL, w_GL = coeffs_GaussLegendre(n)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(x_CC, 0*x_CC, marker="o", linestyle="", label="Clenshaw-Curtis nodes")
plt.plot(x_GL, 0*x_GL, marker="o", linestyle="", label="Gauss-Legendre nodes")
plt.xlabel('x', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Position of the nodes, n=%s' %n, fontsize = 18)
plt.tick_params(labelsize = 18)
plt.yticks([])
plt.show()

On all the examples we considered, it seems like both the Clenshaw-Curtis rule and the Gauss-Legendre rule converged to the exact integral, up to maybe rounding errors. This is really the typical behavior that can be expected from these quadrature rules, as shown by the following theorem.
Let $f$ be a continuous function on $[-1,1]$, and $I^n_{[-1,1]}$ be either the Clenshaw-Curtis or the Gauss-Legendre rule of degree $n$. Then
\begin{align*} \lim_{n\to+\infty} I^n_{[-1,1]}(f) = \int_{-1}^1 f(x) dx . \end{align*}Proof. First, since both of these rules are of order at least $n$, we have $I_{[-1,1]}^n(Q)=\int_{-1}^1 Q(x) d x$ for any polynomial $Q$ of degree $n$ or less. Therefore, $$ \begin{aligned} \left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| & \leq\left|\int_{-1}^1 f(x) d x-\int_{-1}^1 Q(x) d x\right|+\left|I_{[-1,1]}^n(Q)-I_{[-1,1]}^n(f)\right| \\ & \leq \int_{-1}^1|f(x)-Q(x)| d x+\sum_{k=0}^n\left|Q\left(x_k\right)-f\left(x_k\right)\right|\left|\omega_k\right| \\ & \leq \sup _{x \in[-1,1]}|f(x)-Q(x)| \int_{-1}^1 d x+\sup _{x \in[-1,1]}|f(x)-Q(x)| \sum_{k=0}^n\left|\omega_k\right| . \end{aligned} $$
For any $n \geq 0$, we have that both rules have order at least 0 , hence $\sum_{k=0}^n \omega_k=2$, and have nonnegative weights $\omega_k$, which means $\sum_{k=0}^n\left|\omega_k\right|=2$. Thus, we end up with $$ \left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| \leq 4 \sup _{x \in[-1,1]}|f(x)-Q(x)|, $$ for all polynomials $Q$ of degree $n$ or less. However, by the Weierstrass approximation theorem, for any $\varepsilon>0$ there exists a polynomial $Q_{\varepsilon}$ so that $\sup _{x \in[-1,1]}\left|f(x)-Q_{\varepsilon}(x)\right| \leq \frac{\varepsilon}{4}$ is arbitrarily small. Denoting by $n_{\varepsilon}$ the degree of the polynomial $Q_{\varepsilon}$, we have that, for all $n \geq n_{\varepsilon}$, $$ \left|\int_{-1}^1 f(x) d x-I_{[-1,1]}^n(f)\right| \leq \varepsilon . $$
As can be seen from the proof, the above theorem is in fact not specific to the Clenshaw-Curtis and the Gauss-Legendre rules, but hold for any family of quadrature rules such that:
Conclusions
While Newton-Cotes quadrature rules do not behave well when $n$ becomes too large, Clenshaw-Curtis and Gauss-Legendre rules both have very good theoretical properties: they converge for any continuous function, and the smoother the function the faster the convergence. However, even for Clenshaw-Curtis and Gauss-Legendre rules, one has to be mindful about how the weights are computed for large $n$ (there exist good algorithms to compute these weights in a stable and efficient manner, but this goes beyond the scope of these notes).
From the viewpoint of the order of accuracy, Gauss-Legendre rules are superior to Clenshaw-Curtis rules, but this does not always translate into significantly smaller errors for $n$ large.
If we want to avoid using a quadrature rule with a very large $n$, we can use instead a piecewise approach, based on a subdivision of the interval in $m$ smaller subintervals, and elementary quadrature rules of lower degree $n$ on each subinterval. We describe and analyze the behavior of such a piecewise approach in this section.
Let $(t_j)_{j=0\ldots m}$ be $m+1$ distinct given points in $[a,b]$, such that $a=t_0<t_1<\ldots<t_m=b$. We consider the corresponding subdivision of the interval:
$$ [a,b] = \bigcup_{j=0}^{m-1} [t_j,t_{j+1}]. $$The set of points $(t_j)_{i=0\ldots m}$ is said to be a mesh of the interval $[a,b]$ and we define the mesh size as:
$$h = \max_{j=0\ldots m-1}{\lvert t_{j+1} - t_j \rvert}.$$This parameter $h$ is the one we are going to change to adapt the quality of the approximation: hopefully, when $h$ goes to $0$ we get closer and closer to the exact integral.
Consider an interval $[a,b]$, a set of $m+1$ mesh points $(t_j)_{0\leq j\leq m}$ such that $a = t_0 < t_1 < \ldots < t_m = b$, and an integer $n$. A composite quadrature rule of degree $n$ associated to the mesh $(t_j)_{0\leq j\leq m}$ is an approximation of $\int_a^b$ of the following form
$$ \int_a^b f(x)dx = \sum_{j=0}^{m-1} \int_{t_j}^{t_{j+1}} f(x)dx \approx \sum_{j=0}^{m-1} I^n_{[t_j,t_{j+1}]}(f), $$where $I^n_{[t_j,t_{j+1}]}$ is an elementary quadrature rule of degree $n$ on $[t_j,t_{j+1}]$.
We denote by $E_m(f)$ the error
$$ E_m(f) = \left\vert \int_a^b f(x)dx - \sum_{j=0}^{m-1} I^n_{[t_j,t_{j+1}]}(f) \right\vert , $$associated to such a composite quadrature rule (the error also depends on $n$, on $[a,b]$, and on the mesh, but our focus will be on the behavior of the error when $m$ goes to infinity).
The elementary quadrature rule $I^n_{[t_j,t_{j+1}]}$ can be any of the quadrature rules of degree $n$ that we have seen up to now.
In principle, one could use a different quadrature rule on each subinterval $[t_j,t_{j+1}]$ (and even change the degree $n$ on each subinterval), but to keep things simple we only consider here composite quadrature rules with the same elementary rule on all subintervals.
Also to keep things simple, in practice we are only going to use uniform meshes, meaning that the $t_j$ are given by
In that situation, each subinterval has length $h=\frac{b-a}{m}$, and making $h$ go to zero is equivalent to making $m$ go to infinity.
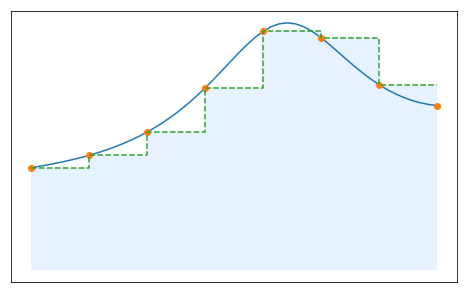
For $n=0$, if we use the left rectangle elementary rule on each subinterval we obtain:
$$ \int_a^b f(x)dx \approx \sum_{j=0}^{m-1} I^0_{[t_j,t_{j+1}]}(f) = \sum_{j=0}^{m-1} (t_{j+1}-t_j)\,f(t_j). $$If we use a uniform mesh, we simply get the following formula for the composite left rectangle method:
$$ \int_a^b f(x)dx \approx \frac{b-a}{m}\sum_{j=0}^{m-1} f(t_j). $$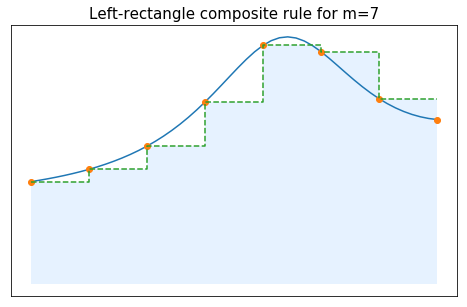
Still for $n=0$, if we instead use the mid-point elementary rule on each subinterval we obtain:
$$ \int_a^b f(x)dx \approx \sum_{j=0}^{m-1} (t_{j+1}-t_j)\,f(t_{j+1/2}), $$which, for a uniform mesh, simplifies into
$$ \int_a^b f(x)dx \approx \frac{b-a}{m}\sum_{j=0}^{m-1} f(t_{j+1/2}), $$where $t_{j+1/2} = \frac{1}{2}(t_j+t_{j+1})$ denotes the mid-point of the subinterval $[t_j,t_{j+1}]$.
For $n=1$, the composite quadrature based on the elementary trapezoidal rule gives:
$$ \int_a^b f(x)dx \approx \sum_{j=0}^{m-1} I^0_{[t_j,t_{j+1}]}(f) = \sum_{j=0}^{m-1} \frac{t_{j+1}-t_j}{2}\,(f(t_j)+f(t_{j+1})). $$If we use a uniform mesh, we simply get the following formula for the composite trapezoidal method:
$$ \int_a^b f(x)dx \approx \frac{b-a}{m}\sum_{j=0}^{m-1} \frac{f(t_j)+f_(t_{j+1})}{2} = \frac{b-a}{m}\left(\frac{f(t_0)+f(t_{m})}{2} + \sum_{j=1}^{m-1} f(t_j) \right) . $$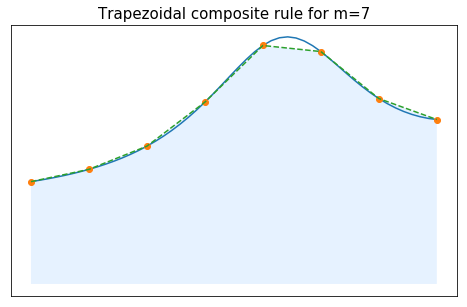
Complete the following cell to get a function QuadRule_composite which evaluates such a piecewise approximation of the integral. Hints: you may use the function QuadRule on each subinterval, and the fact that, given some $nodes$ and $weights$ for an elementary quadrature rule on $[-1,1]$, the corresponding nodes and weights on any interval $[a,b]$ are given by $a + (nodes+1)(b-a)/2$ and $weights(b-a)/2$ respectively.
def QuadRule_composite(f, mesh, nodes_elem, weights_elem):
"""
Approximate integral using a composite quadrature rule
-----------------------------------------
Inputs :
f: function to be integrated
mesh: the mesh points [t_0,...,t_m] defining the subintervals
nodes_elem, weights_elem: the coefficients of the elementary quadrature rule (on [-1,1])
Output
the value of the composite quadrature rule applied to f
"""
m = mesh.size - 1 # number of subintervals
I_comp = 0
for j in np.arange(0,m):
tj = mesh[j] # getting t_j
tjp1 = mesh[j+1] # getting t_{j+1}
nodes_rescaled = tj+(nodes_elem+1)*(tjp1-tj)/2 # nodes of the elementary rule rescaled for the interval [t_j,t_{j+1}]
weights_rescaled = weights_elem*(tjp1-tj)/2 # weights of the elementary rule rescaled for the interval [t_j,t_{j+1}]
I_comp = I_comp + QuadRule(f, nodes_rescaled, weights_rescaled) # elementary quadrature on [t_j,t_{j+1}]
return I_comp
Consider again the function $f(x)=\cos\left(\frac{\pi}{2} x\right)$, and its integral between $-1$ and $1$. Using the function QuadRule_composite, approximate this integral using a composite quadrature rule with a uniform mesh and $n=1$ for the elementary rule. Study the behavior of the error when $m$ increase, and compare what happens when the elementary rule is a Newton-Cotes rule, a Clenshaw-Curtis rule, or a Gauss-Legendre rule (always of degree $n=1$ for the moment).
def f(x):
return np.cos(pi/2*x)
a = -1
b = 1
I = 4/pi # exact value of the integral of f from -1 to 1
n = 1
nodes_elem_NC, weights_elem_NC = coeffs_NewtonCotes(n)
nodes_elem_CC, weights_elem_CC = coeffs_ClenshawCurtis(n)
nodes_elem_GL, weights_elem_GL = coeffs_GaussLegendre(n)
m_max = 100
tab_m = np.arange(1, m_max+1)
tab_IcompNC = np.zeros(m_max)
tab_IcompCC = np.zeros(m_max)
tab_IcompGL = np.zeros(m_max)
# computation of the approximated value of the integral for m = 1,...,m_max
for m in tab_m:
mesh = np.linspace(a, b, m+1)
tab_IcompNC[m-1] = QuadRule_composite(f, mesh, nodes_elem_NC, weights_elem_NC)
tab_IcompCC[m-1] = QuadRule_composite(f, mesh, nodes_elem_CC, weights_elem_CC)
tab_IcompGL[m-1] = QuadRule_composite(f, mesh, nodes_elem_GL, weights_elem_GL)
# computation of the error
tab_errNC = np.abs(tab_IcompNC - I)
tab_errCC = np.abs(tab_IcompCC - I)
tab_errGL = np.abs(tab_IcompGL - I)
# plot
tab_m = tab_m.astype(float)
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_m, tab_errNC, marker="o", label="composite Newton-Cotes rule")
plt.plot(tab_m, tab_errCC, marker="o", label="composite Clenshaw-Curtis rule")
plt.plot(tab_m, tab_errGL, marker="o", label="composite Gauss-Legendre rule")
plt.xlabel('m', fontsize = 18)
plt.ylabel('Error $E_m(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $\int_{-1}^1 \cos(\pi/2 x) dx$, composite rules with n=%s'%n, fontsize = 18)
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

What scales did you use for the previous plot? Can you think of a different scale in which one could better understand the behavior of the error? Can you guess how the error behaves with respect to $m$ for each case?
# plot
tab_m = tab_m.astype(float)
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_m, tab_errNC, marker="o", label="composite Newton-Cotes rule")
plt.plot(tab_m, tab_errCC, marker="o", label="composite Clenshaw-Curtis rule")
plt.plot(tab_m, tab_errGL, marker="o", label="composite Gauss-Legendre rule")
plt.plot(tab_m, 1/tab_m**2, linestyle="--", linewidth=3, label="$1/m^2$")
plt.plot(tab_m, 1/tab_m**4, linestyle="--", linewidth=3, label="$1/m^4$")
plt.xlabel('m', fontsize = 18)
plt.ylabel('Error $E_m(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $\int_{-1}^1 \cos(\pi/2 x) dx$, composite rules with n=%s'%n, fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

Using a logarithmic scale for both the error and $m$, we get lines in the plot, i.e.
$$ \ln (E_m(f)) \approx \alpha \ln m + \beta, $$which suggests that we could have
$$ E_m(f) = \frac{C}{m^{-\alpha}}. $$Plotting the curves given by $E_m = 1/m^2$ and $E_m = 1/m^4$, it seems that we have $\alpha = -2$ for the Newton-Cotes and Clenshaw-Curtis composite rules, and $\alpha=-4$ for the Gauss-Legendre composite rule.
Here we chose to study the behavior of the error with respect to $m$, but it is also common to look at its behavior with respect to $h$, which can be especially relevant for non-uniform meshes. In our case both viewpoints are fully equivalent since we have the relationship $h=(b-a)/m$, and plots with respect to $h$ can be observed below.
# plot
tab_h = (b-a)/tab_m
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_h, tab_errNC, marker="o", label="composite Newton-Cotes rule")
plt.plot(tab_h, tab_errCC, marker="o", label="composite Clenshaw-Curtis rule")
plt.plot(tab_h, tab_errGL, marker="o", label="composite Gauss-Legendre rule")
plt.plot(tab_h, tab_h**2, linestyle="--", linewidth=3, label="$h^2$")
plt.plot(tab_h, tab_h**4, linestyle="--", linewidth=3, label="$h^4$")
plt.xlabel('h', fontsize = 18)
plt.ylabel('Error $E_h(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $\int_{-1}^1 \cos(\pi/2 x) dx$, composite rules with n=%s'%n, fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

We can prove an error estimate for composite quadrature rules, which confirms the numerical observations made just above, and highlights the importance of the order of accuracy for composite rules.
Convergence of composite quadrature rules. Consider an interval $[a,b]$, a set of $m+1$ mesh points $(t_j)_{0\leq j\leq m}$ such that $a = t_0 < t_1 < \ldots < t_m = b$, an integer $n$, and a composite quadrature rule of the form
$$ \int_a^b f(x)dx = \sum_{j=0}^{m-1} \int_{t_j}^{t_{j+1}} f(x)dx \approx \sum_{j=0}^{m-1} I^n_{[t_j,t_{j+1}]}(f). $$If the elementary quadrature rule used on each subinterval $[t_j,t_{j+1}]$ is of order of accuracy at least $n_a$, and $f\in{\cal C}^{n_a+1}([a,b])$, then there exists a constant $C$ (independent of $m$), such that the error is bounded as follows:
$$ E_m(f) \leq C \sup_{x\in [a,b]} \left\vert \,f^{(n_a+1)}(x)\,\right\vert (b-a) \, h^{n_a+1}, $$where we recall that
$$h = \max_{j=0,\ldots,m-1} \left\vert t_{j+1} - t_j \right\vert.$$Proof. We split the error $$ \begin{aligned} E_m(f) & =\left|\int_a^b f(x) d x-\sum_{j=0}^{m-1} I_{\left[t_j, t_{j+1}\right]}^n(f)\right| \\ & \leq \sum_{j=0}^{m-1}\left|\int_{t_j}^{t_{j+1}} f(x) d x-I_{\left[t_j, t_{j+1}\right]}^n(f)\right|, \end{aligned} $$ and use on each term the error bound for elementary quadrature rules based on the order of accuracy that we have obtained at the beginning of this chapter, namely $$ \left|\int_{t_j}^{t_{j+1}} f(x) d x-I_{\left[t_j, t_{j+1}\right]}^n(f)\right| \leq C\left(t_{j+1}-t_j\right)^{n_a+2} \sup _{x \in\left[t_j, t_{j+1}\right]}\left|f^{\left(n_a+1\right)}(x)\right|, $$ where the constant $C$ is given by $$ C=\frac{2+\sum_{k=0}^n\left|\omega_k\right|}{\left(n_a+1\right)!2^{n_a+2}} $$
Summing all these terms, and using that $\sup _{x \in\left[t_j, t_{j+1}\right]}\left|f^{\left(n_a+1\right)}(x)\right| \leq \sup _{x \in[a, b]}\left|f^{\left(n_a+1\right)}(x)\right|$, we get $$ \begin{aligned} E_m(f) & \leq C \sup _{x \in[a, b]}\left|f^{\left(n_a+1\right)}(x)\right| \sum_{j=0}^{m-1}\left(t_{j+1}-t_j\right)^{n_a+2} \\ & \leq C \sup _{x \in[a, b]}\left|f^{\left(n_a+1\right)}(x)\right| \sum_{j=0}^{m-1} h^{n_a+1}\left(t_{j+1}-t_j\right) \\ & =C \sup _{x \in[a, b]}\left|f^{\left(n_a+1\right)}(x)\right|(b-a) h^{n_a+1} . \end{aligned} $$
The key term in the above error estimation is $h^{n_a+1}$, which tells us at which rate the error goes to $0$ when $h$ goes to $0$. The larger $n_a$ the fastest the convergence, which explains why, for the same value of $n$, we observed a faster convergence with a composite rule based on Gauss-Legendre elementary rule rather than Newton-Cotes or Clenshaw-Curtis elementary rules.
In the case of a uniform mesh, where $h=(b-a)/m$, we get
Does the behavior of this error bound with respect to $m$ match what you observed numerically above for the Newton-Cotes, Clenshaw-Curtis and Gauss-Legendre composite quadrature rules with $n=1$?
Repeat the same experiment with larger values of $n$.
def f(x):
return np.cos(pi/2*x)
a = -1
b = 1
I = 4/pi # exact value of the integral of f from -1 to 1
n = 1
nodes_elem_NC, weights_elem_NC = coeffs_NewtonCotes(n)
nodes_elem_CC, weights_elem_CC = coeffs_ClenshawCurtis(n)
nodes_elem_GL, weights_elem_GL = coeffs_GaussLegendre(n)
m_max = 100
tab_m = np.arange(1, m_max+1)
tab_IcompNC = np.zeros(m_max)
tab_IcompCC = np.zeros(m_max)
tab_IcompGL = np.zeros(m_max)
# computation of the approximated value of the integral for m = 1,...,m_max
for m in tab_m:
mesh = np.linspace(a, b, m+1)
tab_IcompNC[m-1] = QuadRule_composite(f, mesh, nodes_elem_NC, weights_elem_NC)
tab_IcompCC[m-1] = QuadRule_composite(f, mesh, nodes_elem_CC, weights_elem_CC)
tab_IcompGL[m-1] = QuadRule_composite(f, mesh, nodes_elem_GL, weights_elem_GL)
# computation of the error
tab_errNC = np.abs(tab_IcompNC - I)
tab_errCC = np.abs(tab_IcompCC - I)
tab_errGL = np.abs(tab_IcompGL - I)
# plot
tab_m = tab_m.astype(float)
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_m, tab_errNC, marker="o", label="composite Newton-Cotes rule")
plt.plot(tab_m, tab_errCC, marker="o", label="composite Clenshaw-Curtis rule")
plt.plot(tab_m, tab_errGL, marker="o", label="composite Gauss-Legendre rule")
plt.plot(tab_m, 1/tab_m**4, linestyle="--", linewidth=3, label="$1/m^4$")
plt.plot(tab_m, 1/tab_m**6, linestyle="--", linewidth=3, label="$1/m^6$")
plt.xlabel('m', fontsize = 18)
plt.ylabel('Error $E_m(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $\int_{-1}^1 \cos(\pi/2 x) dx$, composite rules with n=%s'%n, fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

For $n=1$ (odd value of $n$), we have seen that the order of accuracy for Newton-Cotes and Clenshaw-Curtis rules is equal to $1$, and therefore the error estimator decays like $1/m^{n_a+1} = 1/m^2$, which is what we observed. For the Gauss-Legendre rule, we have $n_a=2n+1 = 3$ and so we expect a decay proportional to $1/m^{n_a+1} = 1/m^4$, which is also observed.
Similarly, for $n=2$ (even value of $n$), we have seen that the order of accuracy for Newton-Cotes and Clenshaw-Curtis rules is equal to $n+1=3$, which explains the decay proportional to $1/m^{n_a+1} = 1/m^4$ observed above. For the Gauss-Legendre rule, we have $n_a=2n+1 = 5$ and so we expect a decay proportional to $1/m^{n_a+1} = 1/m^6$, which is also observed.
Use composite quadrature rules to approximate $\int_0^1 \sqrt{x} dx$, and study numerically the behavior of the error with respect to $m$. Comment on the obtained results.
def f(x):
return np.sqrt(x)
a = 0
b = 1
I = 2/3 # exact value of the integral of f from 0 to 1
n = 1
nodes_elem_NC, weights_elem_NC = coeffs_NewtonCotes(n)
nodes_elem_CC, weights_elem_CC = coeffs_ClenshawCurtis(n)
nodes_elem_GL, weights_elem_GL = coeffs_GaussLegendre(n)
m_max = 100
tab_m = np.arange(1, m_max+1)
tab_IcompNC = np.zeros(m_max)
tab_IcompCC = np.zeros(m_max)
tab_IcompGL = np.zeros(m_max)
# computation of the approximated value of the integral for m = 1,...,m_max
for m in tab_m:
mesh = np.linspace(a, b, m+1)
tab_IcompNC[m-1] = QuadRule_composite(f, mesh, nodes_elem_NC, weights_elem_NC)
tab_IcompCC[m-1] = QuadRule_composite(f, mesh, nodes_elem_CC, weights_elem_CC)
tab_IcompGL[m-1] = QuadRule_composite(f, mesh, nodes_elem_GL, weights_elem_GL)
# computation of the error
tab_errNC = np.abs(tab_IcompNC - I)
tab_errCC = np.abs(tab_IcompCC - I)
tab_errGL = np.abs(tab_IcompGL - I)
# plot
tab_m = tab_m.astype(float)
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_m, tab_errNC, marker="o", label="composite Newton-Cotes rule")
plt.plot(tab_m, tab_errCC, marker="o", label="composite Clenshaw-Curtis rule")
plt.plot(tab_m, tab_errGL, marker="o", label="composite Gauss-Legendre rule")
plt.plot(tab_m, 1/tab_m**(3/2), linestyle="--", linewidth=3, label="$1/m^{3/2}$")
plt.xlabel('m', fontsize = 18)
plt.ylabel('Error $E_m(f)$', fontsize = 18)
plt.legend(fontsize = 14)
plt.title('Approximation of $\int_{0}^1 \sqrt{x} dx$, composite rules with n=%s'%n, fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.tick_params(labelsize = 18)
plt.show()

The function $\sqrt{\ }$ is not $C^1$, and therefore the error estimates that we have seen do not apply. Indeed, we observe that the error only decays like $1/m^{3/2}$, even when the order of accuracy of the elementary rule used is larger than $1$.
Conclusions
If we do not want to use quadrature rules with a large degree $n$, composite quadrature rules offer a good alternative. For composite rules, the rate of convergence is really dictated by the order of accuracy of the elementary rule used (provided the function that is integrated is smooth enough).
Nicholas Constantine Metropolis (1915 - 1999). Nicholas Constantine Metropolis is a Greek-American physicist. In the 1950s, a group of researchers led by Metropolis, including John von Neumann and Stanislaw Ulam, developed the Monte Carlo method. This term describes a broad class of algorithms relying on random sampling. The basic idea is to use randomness to solve deterministic problems. These kind of methods are now widely used, for instance in optimization, integration and probability.
Suppose you want to compute $\int_a^b f(x)dx$. The Monte-Carlo approach simply consists in taking $n$ random points $x_1,\ldots,x_n$ distributed uniformly in $[a,b]$, and approximating the integral by the average of $(b-a)f(x_k)$:
$$ MC^n_{[a,b]}(f) = \frac{b-a}{n} \sum_{k=1}^n f(x_k). $$Stating and proving precise results about the behavior of the Monte-Carlo approach when $n$ goes to infinity requires some knowledge in probability theory which is beyond the scope of this course, but roughly speaking we can say the following.
$MC^n_{[a,b]}(f)$ converges to $\int_a^b f(x) dx$ when $n$ goes to infinity.
The error $\left\vert MC^n_{[a,b]}(f) - \int_a^b f(x) dx \right\vert$ scales roughly like $\frac{C}{\sqrt{n}}$.
The key underlying results from probability theory are the law of large numbers and the central limit theorem.
Complete the following cell, to get a function which computes $MC^n_{[a,b]}(f)$.
def MonteCarlo(f, a, b, n):
"""
Approximate 1d integral using the Monte-Carlo approach
-----------------------------------------
Inputs :
f: function of one variable to be integrated
a, b: endpoints of the segment on which the integral is computed
n: number of points
Output
the approximate value of \int_{a}^{b} f obtained using the Monte-Carlo approach
"""
x = a + (b-a) * np.random.rand(n) # n random points uniformly distributed in [a,b]
return np.sum(f(x)) * (b-a)/n
Complete the following cell using the function MonteCarlo to study graphically the converge of the Monte-Carlo method. Try different functions. Comment on the obtained results.
# case 1
def f(x):
return np.cos(pi/2*x)
a = -1
b = 1
I = 4/pi # exact value of the integral of f from -1 to 1
# # case 2
# def f(x):
# return 1/(1+x**2)
# a = 0
# b = 1
# I = pi/4 # exact value of the integral of f from 0 to 1
# # case 3
# def f(x):
# return 1/(1+25*x**2)
# a = -1
# b = 1
# I = 2/5*atan(5) # exact value of the integral of f from -1 to 1
# # case 4
# def f(x):
# return np.sqrt(x)
# a = 0
# b = 1
# I = 2/3 # exact value of the integral of f from 0 to 1
exp_max = 25
tab_n = 2**np.arange(0, exp_max+1) # values of n between 2^0 and 2^{exp_max}
tab_MCn = np.zeros(tab_n.size) # initialization for the approximate values
i = 0
for n in tab_n:
tab_MCn[i] = MonteCarlo(f, a, b, n)
i = i + 1
tab_err = np.abs(tab_MCn-I) # Error
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o", label="Monte-Carlo approach")
plt.plot(tab_n, 1/tab_n**(1/2), linestyle="--", linewidth=3, label="$1/\sqrt{n}$")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| MC^n(f) - I |$', fontsize = 18)
plt.legend(fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.title('Monte-Carlo method, graphical study of the convergence', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

There are some fluctuations, which are to be expected since the method is of probabilistic nature, but we indeed seem to roughly recover the $\frac{1}{\sqrt{n}}$ convergence rate, independently of the function chosen.
Consider a bounded subset $B\subset \mathbb{R}^d$, $d\geq 1$, and suppose you want to compute $\int_B f(x,y)dxdy$. The Monte-Carlo approach naturally extends to this higher dimensional case, again by taking $n$ random points $(x_1,y_1),\ldots,(x_n,y_n)$ distributed uniformly in $B$, and then averaging the $f(x_k)$.
In practice, directly obtaining random samples uniformly in $B$ might not be very easy (depending on the set $B$). However, there is a simple workaround, that we describe here in dimension $d=2$ (the generalization to higher dimensions is straightforward). Let $a_1,a_2,b_1,b_2$ be such that
$$ B \subset [a_1,b_1]\times[a_2,b_2]. $$Then,
$$ \int_{B} f(x,y)dx dx = \int_{[a_1,b_1]\times[a_2,b_2]} f(x,y) \mathbb{1}_{B} (x,y) dx dy, $$where $\mathbb{1}_{B}$ is the indicator function of $B$, defined as
$$ \mathbb{1}_{B}(x,y) = \left\{ \begin{aligned} &1 \qquad &(x,y)\in B, \\ &0 \qquad &(x,y)\notin B. \end{aligned} \right. $$We can then easily apply the Monte-Carlo approach to
$$ \int_{[a_1,b_1]\times[a_2,b_2]} \tilde f(x,y) dx dy, $$where $\tilde f(x,y) = f(x,y) \mathbb{1}_{B} (x,y)$:
$$ MC^n_{[a_1,b_1]\times[a_2,b_2]}(\tilde f) = \frac{(b_1-a_1)(b_2-a_2)}{n} \sum_{k=1}^n \tilde f(x_k,y_k), $$with random points $x_1,\ldots,x_n$ distributed uniformly in $[a_1,b_1]$, and random points $y_1,\ldots,y_n$ distributed uniformly in $[a_2,b_2]$.
Regarding the converge, the results are the same as in dimension 1 (again stated somewhat imprecisely).
$MC^n_{[a_1,b_1]\times[a_2,b_2]}(f)$ converges to $\int_{[a_1,b_1]\times[a_2,b_2]} f(x,y) dxdy$ when $n$ goes to infinity.
The error $\left\vert MC^n_{[a_1,b_1]\times[a_2,b_2]}(f) - \int_{[a_1,b_1]\times[a_2,b_2]} f(x,y) dxdy \right\vert$ scales roughly like $\frac{C}{\sqrt{n}}$.
It is remarkable that we need only $n$ samples, as in dimension 1, to get the same scaling for the error, and that this scaling does not require any smoothness assumption on $f$.
The same cannot be said for the quadrature rules that we have seen previously. Indeed, they cannot be as easily generalized to higher dimensions, especially when the domain $B$ is not a rectangle. Even then, the number $n$ of samples needed becomes $n^d$ in dimension $d$, which can become prohibitive, whereas Monte-Carlo's approach requires $n$ samples to get an error of $\frac{C}{\sqrt{n}}$ independently of the dimension.
Complete the following cell, to get a function which computes the Monte-Carlo approximation $MC^n_{[a_1,b_1]\times[a_2,b_2]}(f)$ on a rectangle.
def MonteCarlo_2D(f, a, b, n):
"""
Approximate 2d integral on a rectangle using the Monte-Carlo approach
-----------------------------------------
Inputs :
f: function of two variables to be integrated
a, b: arrays a=[a_1,a_2] and b=[b_1,b_2] endpoints of the rectangle on which the integral is computed
n: number of points
Output
the approximate value of \int_{[a_1,b_1]x[a_2,b_2]} f obtained using the Monte-Carlo approach
"""
x = a[0] + (b[0]-a[0]) * np.random.rand(n) # first coordinate, uniformly distributed in [a_1,b_1]
y = a[1] + (b[1]-a[1]) * np.random.rand(n) # second coordinate, uniformly distributed in [a_2,b_2]
return np.sum(f(x, y)) * (b[0]-a[0])*(b[1]-a[1])/n
Run the following cell, which uses the function MonteCarlo_2D, to approximate the area of the unit disk. Compare and comment on the behavior on the error when the rectangle $[a_1,a_2]\times[b_1,b_2]$ changes.
def Ind_disk(x,y): # indicator function of the unit disk
z = x**2+y**2 < 1
return z.astype(int) # converts True/False to 1/0
a = np.array([-1,-1]) # a_1 and a_2
b = np.array([1,1]) # b_1 and b_2
I = pi # exact value of the area of the unit disk
exp_max = 25
tab_n = 2**np.arange(0, exp_max+1) # values of n between 2^0 and 2^{exp_max}
tab_MCn = np.zeros(tab_n.size) # initialization for the approximate values
i = 0
for n in tab_n:
tab_MCn[i] = MonteCarlo_2D(Ind_disk, a, b, n)
i = i + 1
tab_err = np.abs(tab_MCn-I) # Error
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_err, marker="o", label="Monte-Carlo approach")
plt.plot(tab_n, 1/tab_n**(1/2), linestyle="--", linewidth=3, label="$1/\sqrt{n}$")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| MC^n(f) - I |$', fontsize = 18)
plt.legend(fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.title('Monte-Carlo method, dimension 2, graphical study of the convergence', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

The error always decays roughly like $\frac{C}{\sqrt{n}}$, as predicted, but it seems that a larger rectangle $[a_1,a_2]\times[b_1,b_2]$ leads to a larger constant $C$.
We recall we need to compute the following elliptic integral:
$$ l = \int_{0}^{48} \sqrt{1 + cos^2(x)}dx$$.
Compute this integral with the method of your choice. How confident are you in the results?
We compare the results obtained using either an elementary Gauss-Legendre quadrature with a large number of nodes, or a composite Gauss-Legendre rule.
def felliptic(x):
return np.sqrt(1 + np.cos(x)**2)
a = 0
b = 48
#Elementary Gauss-Legendre rule
nmax = 100
tab_n = np.arange(0, nmax+1)
tab_InGL = np.zeros(nmax+1)
# computation of the approximated value of the integral for n = 0,...,nmax
for n in tab_n:
x_nGL, w_nGL = coeffs_GaussLegendre(n) # coefficients for the rule on [-1,1]
x_nGL = a + (b-a)/2 * (x_nGL+1) # rescaled nodes on [a,b]
w_nGL = (b-a)/2 * w_nGL # rescaled weights on [a,b]
tab_InGL[n] = QuadRule(felliptic, x_nGL, w_nGL)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_n, tab_InGL, marker="o", label="Gauss-Legendre elementary rule")
plt.xlabel('n', fontsize = 18)
plt.ylabel('$I^n(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $ I = \int_{0}^{48} \sqrt{1+\cos^2x} dx$', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

#Composite Gauss-Legendre rule
n = 5 # degree of the elementary rule used
nodes_elem_GL, weights_elem_GL = coeffs_GaussLegendre(n)
m_max = 50
tab_m = np.arange(1, m_max+1)
tab_IcompGL = np.zeros(m_max)
# computation of the approximated value of the integral for m = 1,...,nmax
for m in tab_m:
mesh = np.linspace(a, b, m+1) # subdivision of [a,b] into m subintervals
tab_IcompGL[m-1] = QuadRule_composite(felliptic, mesh, nodes_elem_GL, weights_elem_GL)
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_m, tab_IcompGL, marker="o", label="composite Gauss-Legendre rule")
plt.xlabel('m', fontsize = 18)
plt.ylabel('$I_m(f)$', fontsize = 18)
plt.legend(fontsize = 18)
plt.title('Approximation of $ I = \int_{0}^{48} \sqrt{1+\cos^2x} dx$, composite rules with n=%s'%n, fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()

# Comparison
# elementary
n = 500
x_nGL, w_nGL = coeffs_GaussLegendre(n) # coefficients for the rule on [-1,1]
x_nGL = a + (b-a)/2 * (x_nGL+1) # rescaled nodes on [a,b]
w_nGL = (b-a)/2 * w_nGL # rescaled weights on [a,b]
I500GL = QuadRule(felliptic, x_nGL, w_nGL)
n = 1000
x_nGL, w_nGL = coeffs_GaussLegendre(n) # coefficients for the rule on [-1,1]
x_nGL = a + (b-a)/2 * (x_nGL+1) # rescaled nodes on [a,b]
w_nGL = (b-a)/2 * w_nGL # rescaled weights on [a,b]
I1000GL = QuadRule(felliptic, x_nGL, w_nGL)
# composite
n = 5 # degree of the elementary rule used
nodes_elem_GL, weights_elem_GL = coeffs_GaussLegendre(n)
m = 100
mesh = np.linspace(a, b, m+1) # subdivision of [a,b] into m subintervals
Icomp100GL = QuadRule_composite(felliptic, mesh, nodes_elem_GL, weights_elem_GL)
m = 200
mesh = np.linspace(a, b, m+1) # subdivision of [a,b] into m subintervals
Icomp200GL = QuadRule_composite(felliptic, mesh, nodes_elem_GL, weights_elem_GL)
print(I500GL)
print(I1000GL)
print(Icomp100GL)
print(Icomp200GL)
58.470469154899135 58.47046915489963 58.47046915489896 58.47046915489932
Both the elementary and the composite rule seem to give converging values. In the cell just above, we see that the 13 first digits agree between the different methods, and that the results barely changes (up to the 14th digit only) when the number of nodes/subintervals is double, which strongly suggests that we indeed have a very accurate approximation of the results. The built-in function quad from scipy, which uses a more sophisticated version of the quadrature rules we have just seen, also gives a very similar value (see below).
from scipy.integrate import quad
I, err = quad(felliptic,0,48)
print(I)
58.470469154899625
For the composite rule, we could have gotten an error bound (not taking into account rounding errors), by using the formula
$$ E_m(f) \leq \frac{C \sup_{x\in [a,b]} \left\vert f^{(n_a+1)}(x)\right\vert (b-a)^{n_a+1}}{m^{n_a+1}}, $$with $C = \frac{4}{(n_a+1)!2^{n_a+2}}$ and the appropriate value of the order of accuracy $n_a$, but this requires to compute, and bound, the derivative of order $n_a+1$ of $f(x) = \sqrt{1+\cos^2x}$.
We recall we want to estimate the integral of a speed function $v$
$$ \text{Length} = \int_0^{84} v(t)dt, $$and that $v$ is known only at some discrete points:
time = np.linspace(0,84,15)
speed = np.array([124, 134, 148, 156, 147, 133, 180, 109, 99, 85, 78, 89, 104, 116, 123])
print('The times at which the speed was measured:', time)
print('The speed at each of these times:', speed)
The times at which the speed was measured: [ 0. 6. 12. 18. 24. 30. 36. 42. 48. 54. 60. 66. 72. 78. 84.] The speed at each of these times: [124 134 148 156 147 133 180 109 99 85 78 89 104 116 123]
Compute the length of the track with the method of your choice. How confident are you in the results?
Here the nodes (i.e. the times at which the speed $v$ is evaluated is measured) are fixed and equidistant, therefore we have fewer choices.
One could use an elementary Newton-Cotes rule of degree 14, taking into account all the points, but we saw that such rule could be unstable when the degree was 8 or more. Indeed this is not a good idea, since the output below, which should be an approximation of the total length of the track, is negative...
# Elementary Newton-Cotes rule of degree 14
n = 14
x_nNC, w_nNC = coeffs_NewtonCotes(n) # coefficients for the rule on [-1,1]
a = 0
b = 84
w_nNC = (b-a)/2 * w_nNC # rescaled weights on [a,b]
I14NC = np.sum(speed * w_nNC) # the values in speed correspond to the v(x_k) for 14+1 equidistant nodes x_k
print(I14NC)
-7255.210134634567
Here are some other options:
We explore both options below.
# Elementary Newton-Cotes rule of degree 7, using only each other point
n = 7
x_nNC, w_nNC = coeffs_NewtonCotes(n) # coefficients for the rule on [-1,1]
a = 0
b = 84
w_nNC = (b-a)/2 * w_nNC # rescaled weights on [a,b]
I7NC = np.sum(speed[0::2] * w_nNC) # the values in speed correspond to the v(x_k) for 7+1 equidistant nodes x_k
print(I7NC)
10784.409027777778
# Composite Newton-Cotes rule of degree n=7, m=2 subintervals
n = 7
x_nNC, w_nNC = coeffs_NewtonCotes(n) # coefficients for the rule on [-1,1]
a = 0
b = 84
w_nNC = (b-a)/4 * w_nNC # rescaled weights on half the interval
I7compNC = np.sum(speed[0:8] * w_nNC) + np.sum(speed[7:16] * w_nNC)
print(I7compNC)
10373.824999999999
# Composite Newton-Cotes rule of degree n=1 (trapezoidal rule), m=14 subintervals
a = 0
b = 84
m = 14
I1compNC = (b-a)/m * np.sum((speed[0:-1]+speed[1:])/2)
print(I1compNC)
10209.0
At least all the answers are now positive, and it seems that the total length is somewhere between 10000 and 11000 feet, but it is not possible to give a very precise approximation without additional data.
We recall that we want to compute the volume of solids $B$ of the form
$$ B = \left\{ (x,y,z)\in\mathbb{R}^3,\ \left(\left|\frac{x}{a}\right|^{\frac{2}{e}}+\left|\frac{y}{b}\right|^{\frac{2}{e}}\right)^{\frac{e}{n}}+\left|\frac{z}{c}\right|^{\frac{2}{n}}\leq 1 \right\}. $$In the following cell, we give a function which can be used to visualize such super-ellipsoid $B$, based on parametric equations of the boundary, given by
$$\left\{\begin{array}{l} x(u,v)=a\, |cos(u)|^e \,|sin(v)|^n \,sign(cos(u)) \,sign(sin(v))\\ y(u,v)=b \,|sin(u)|^e \,|sin(v)|^n \,sign(sin(u)) \,sign(sin(v))\\ z(u,v)=c \,|cos(v)|^n \,sign(cos(v)) \end{array} \right. $$for $u\in[0,\pi]$ and $v\in[0,2\pi]$.
# Function to plot a super-ellipsoid
# inputs: parameters e (real>0), n (real>0), a (real>0), b (real>0), c (real>0) of the super-ellipsoid
def plot_superellipsoid(e,n,a,b,c):
"Parametric surface S: (u,v)->((x(u,v),y(u,v),z(u,v))"
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm # for the color map
fig = plt.figure(figsize=(10, 6))
trace1 = fig.add_subplot(111, projection='3d')
N = 100
Dx = np.linspace(0, np.pi, N)
Dy = np.linspace(0, 2*np.pi, 2*N)
# Computations of x, y, z
x = np.asarray([[a*abs(cos(u))**e*abs(sin(v))**n*copysign(1,cos(u))*copysign(1,sin(v)) for v in Dy] for u in Dx])
y = np.asarray([[b*abs(sin(u))**e*abs(sin(v))**n*copysign(1,sin(u))*copysign(1,sin(v)) for v in Dy] for u in Dx])
z = np.asarray([[c*abs(cos(v))**n*copysign(1,cos(v)) for v in Dy] for u in Dx])
# Surface generation
# rstride et cstride to plot a sub-mesh of Dx x Dy
trace1.plot_surface(x, y, z, rstride = 4, cstride=4, cmap = cm.winter)
#plt.axis('equal')
#plt.axis('off')
plt.title(r"Super Ellipsoid $(|x/a|^{\frac{2}{e}}+|y/b|^{\frac{2}{e}})^{\frac{e}{n}}+|z/c|^{\frac{2}{n}}\leq 1$", fontsize = 20)
plt.show()
e = 3
n = 1
a = 3
b = 4
c = 1
# e = 2
# n = 3
# a = 1
# b = 1
# c = 1
plot_superellipsoid(e,n,a,b,c)

Use the method of your choice to compute the volume of such solids.
Given that the problem is in dimension 3, we use the Monte-Carlo approach. We first try the algorithm on cases where $n=e=1$, because we then have an explicit formula for the volume given in the introduction ($\frac{4}{3}\pi abc$), which allows us to test our code.
def MonteCarlo_3D(f, a, b, n):
"""
Approximate 3d integral on a rectangular cuboid using the Monte-Carlo approach
-----------------------------------------
Inputs :
f: function of three variables to be integrated
a, b: arrays a=[a_1,a_2,a_3] and b=[b_1,b_2,b_3] endpoints of the rectangular cuboid on which the integral is computed
n: number of points
Output
the approximate value of \int_{[a_1,b_1]x[a_2,b_2]x[a_3,b_3]} f obtained using the Monte-Carlo approach
"""
x = a[0] + (b[0]-a[0]) * np.random.rand(n) # first coordinate, uniformly distributed in [a_1,b_1]
y = a[1] + (b[1]-a[1]) * np.random.rand(n) # second coordinate, uniformly distributed in [a_2,b_2]
z = a[2] + (b[2]-a[2]) * np.random.rand(n) # second coordinate, uniformly distributed in [a_2,b_2]
return np.sum(f(x, y, z)) * (b[0]-a[0])*(b[1]-a[1])*(b[2]-a[2])/n
#Test case with a "regular" ellipsoid (e=n=1)
e=1
n=1
a=5
b=3
c=1
plot_superellipsoid(e,n,a,b,c)
I = 4/3*pi*a*b*c # exact value of the volume of the solid, valid only if e=n=1
def Ind_B(x,y,z): # indicator function of the unit disk
test = ( np.abs(x/a)**(2/e) + np.abs(y/b)**(2/e) )**(e/n) + np.abs(z/c)**(2/n) < 1
return test.astype(int) # converts True/False to 1/0
# Boundary for the rectangular cuboid
a_cuboid = np.array([-a,-b,-c])
b_cuboid = np.array([a,b,c])
exp_max = 25
tab_N = 2**np.arange(0, exp_max+1) # values of n between 2^0 and 2^{exp_max}
tab_MCN = np.zeros(tab_N.size) # initialization for the approximate values
i = 0
for N in tab_N:
tab_MCN[i] = MonteCarlo_3D(Ind_B, a_cuboid, b_cuboid, N)
i = i + 1
tab_err = np.abs(tab_MCN-I) # Error
# plot
fig = plt.figure(figsize=(10, 6))
plt.plot(tab_N, tab_err, marker="o", label="Monte-Carlo approach")
plt.plot(tab_N, 1/tab_N**(1/2), linestyle="--", linewidth=3, label="$1/\sqrt{n}$")
plt.xlabel('n', fontsize = 18)
plt.ylabel('Error $| MC^N(f) - I |$', fontsize = 18)
plt.legend(fontsize = 18)
plt.xscale('log')
plt.yscale('log')
plt.title('Monte-Carlo method, dimension 3, graphical study of the convergence', fontsize = 18)
plt.tick_params(labelsize = 18)
plt.show()


We observe the expected convergence in a case where we have an explicit formula to which we can compare the output of our algorithm, and are now ready to use our algorithm in other cases.
# parameters
e = 3
n = 1
a = 3
b = 4
c = 1
# e = 2
# n = 3
# a = 1
# b = 1
# c = 1
plot_superellipsoid(e,n,a,b,c)
def Ind_B(x,y,z): # indicator function of the unit disk
test = ( np.abs(x/a)**(2/e) + np.abs(y/b)**(2/e) )**(e/n) + np.abs(z/c)**(2/n) < 1
return test.astype(int) # converts True/False to 1/0
# Boundary for the rectangular cuboid
a_cuboid = np.array([-a,-b,-c])
b_cuboid = np.array([a,b,c])
N = 10**7
Approx = MonteCarlo_3D(Ind_B, a_cuboid, b_cuboid, N)
print("N = %e" %N)
print("Approximate volume = %f" %Approx)
N = 1.000000e+07 Approximate volume = 18.831130
Suppose $f: [a,b]\mapsto \mathbb{R}$ is continuous on $[a,b]$. Then, for any $\varepsilon>0$, there exists a polynomial $Q$ such that
\begin{align*} \sup_{x\in [a,b]} \left\vert f(x) - Q(x) \right\vert \leq \varepsilon. \end{align*}# execute this part to modify the css style
from IPython.core.display import HTML
def css_styling():
styles = open("../style/custom3.css").read()
return HTML(styles)
css_styling()